

【導讀】該論文介紹了一種新技術,即使大量機器人采用同樣材質制作,還位于同一磁場影響下,我們依然可以利用磁場選擇性的驅動某個微型機器人,甚至精確到它們身上的某個組件。
控制機器人在人體內的運動一般要靠兩種方法:要么打造一種自帶推進器和導航系統(tǒng)的微型潛水艇機器人,要么就得靠磁場來牽著微型機器人的鼻子走。不過,前者做起來很復雜,后者雖然較易實現(xiàn),但一塊大磁鐵如果冬天放在身上一定很酸爽,最重要的是,這種方法很難一次控制多個微型機器人,為什么呢?因為顧名思義,“磁場”是一種“場”,它的效力很難被限定在某一特定區(qū)域。
在實際運用中,如果你想用一臺核磁共振(MRI)掃描儀來創(chuàng)造磁場,那么無論這個磁場的梯度如何,MRI 觸及范圍的所有東西都會受到影響,因此如果你想讓兩個微型機器人同時做不同的事,幾乎是天方夜譚。
當然,事情都不是絕對的,要想讓微型機器人們學會“左右互搏”術,可以從差異化這個角度入手。這樣一來,持續(xù)的控制輸入就來對機器人造成不同的影響。不過,想讓這種方法在同質化機器人身上起效就難得多了。
天無絕人之路,德國漢堡飛利浦研究院在 Science Robotics 上的論文就為我們指了條明路。該論文介紹了一種新技術,即使大量機器人采用同樣材質制作,還位于同一磁場影響下,我們依然可以利用磁場選擇性的驅動某個微型機器人,甚至精確到它們身上的某個組件。
是不是很酷?那么這樣神奇的控制能力到底是如何實現(xiàn)的呢?且聽我細細道來。
設備內部的整體磁場開了一個洞,也就是所謂的“自由場點”(FFP),多個磁場都會在這里碰面(每個磁場都由獨立線圈生成)。在 FFP 中,磁場的梯度很低,因此也就喪失了驅動物體移動的能力,而這就是對微型機器人進行單獨控制的關鍵切入點。
你可以在需要的區(qū)域,通過調大磁場梯度來“鎖”住不在 FFP 控制范圍內的任何物體。隨后,借助溫和的旋轉磁場,就能讓 FFP 內的物體旋轉起來。通過對 FFP 位置的移動,你就能選擇性的讓某些物體自由旋轉起來。
在這一案例中,那個強大的“鎖”其實是在磁場下作用向一邊傾斜的螺旋體,它們無法旋轉。與其不同的是,F(xiàn)FP 是一個零傾斜的區(qū)域,這就意味著在這里螺旋體可以自由旋轉。這項研究中用到的硬件可以單獨驅動螺旋體,只要螺旋體間間距不超過 3 毫米就有效。
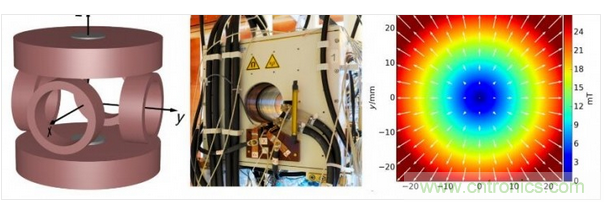
從磁場生成器的示意圖(上圖左)中我們能看到 3 套直角線圈,在 Z 軸方向有一個鐵質內核。磁場生成器(上圖中)上有一個直徑 12 厘米的鉆孔。在 XY 面(上圖右)的理想磁場中心有一個磁場零點,也就是我們上面所說的 FFP,圖中白色的箭頭則代表局部磁場向量。
為了能讓該技術能盡快投入實際使用,研究人員還想了大量應用方法:
第一種應用是基于不同螺旋體驅動機制的。在整形外科中,該技術可在移植過程中起到巨大作用,因為它可以隨著恢復過程改變移植物的形狀。舉例來說,在肢體延長和早發(fā)性脊柱側凸等病癥的治療上,該技術能為醫(yī)生提供更高的靈活性(控制假體形狀的變化)。此外,該技術還能用在微粒體的控制中,只需打造微型磁泵和閥門,無需電力或機械連接,即可單獨對其進行驅動。
第二種應用與負責局部治療的簡單微型機器有關,如遙控一個可以釋放藥物的磁性微型膠囊。此外,它還可以用在遙控用開關控制的放射性種子上,實現(xiàn)對開關的精確控制后,藥物釋放的區(qū)域和劑量都能得到最好的優(yōu)化,不會誤傷“友軍”。
如果用上帶有凹槽的螺旋盾,就能讓定向種子擁有遠程調節(jié)輻射方向的能力,這能讓醫(yī)生精確控制用藥劑量并保護健康組織。此外,磁力操縱精確度可達納米級,通過導管,攜帶藥物的種子可以直達病灶,完成藥物釋放后它們就能從血管中排出。通過設備對其進行影像定位后,只有那些真正進入病灶部位的種子才會被激活。



