

【導(dǎo)讀】純電動汽車電機(jī)驅(qū)動系統(tǒng)的電流控制方法,包括滯環(huán)電流控制法、斜坡交截控制法以及預(yù)測電流控制法等。預(yù)測電流控制法是比較復(fù)雜的,它根據(jù)負(fù)載來進(jìn)行電流預(yù)測。下面將簡要介紹兩種相對簡單的電流控制方法,滯環(huán)電流控制法和斜坡交截控制法。
在純電動汽車電機(jī)驅(qū)動系統(tǒng)電機(jī)控制器廠家中,輸出電流不僅與輸入電壓有關(guān),而且與系統(tǒng)負(fù)載有關(guān),因此,采用閉環(huán)PWM方法是非常有必要的。電流PWM方法采用閉環(huán)控制算法,根據(jù)傳感器中電流的反饋信息,對逆變器進(jìn)行PWM控制。在使用電流PWM方法時(shí),需要將傳感器測量的三相電流與系統(tǒng)外環(huán)控制器產(chǎn)生的3個(gè)參考電流信號進(jìn)行比較。根據(jù)測量信號和參考信號之間的誤差,PWM算法輸出相應(yīng)的選通信號?;陔娏骺氐腜WM方法也有很多,其中既有比較簡單的,也有非常復(fù)雜的。
這些方法包括滯環(huán)電流控制法、斜坡交截控制法以及預(yù)測電流控制法等。預(yù)測電流控制法是比較復(fù)雜的,它根據(jù)負(fù)載來進(jìn)行電流預(yù)測。下面將簡要介紹兩種相對簡單的電流控制方法,滯環(huán)電流控制法和斜坡交截控制法。
滯環(huán)電流控制法
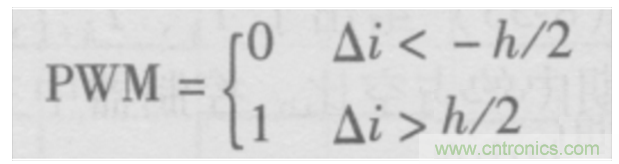
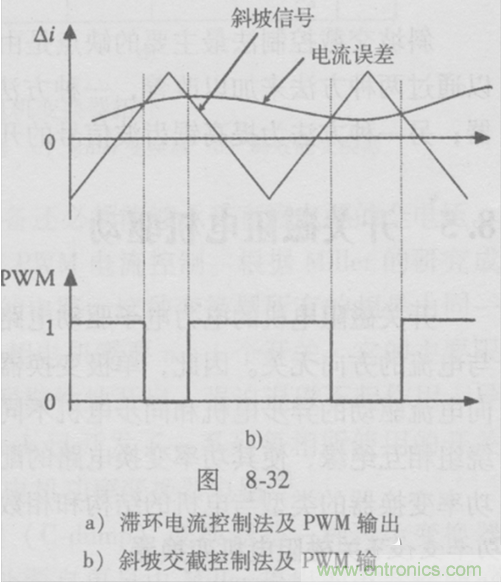
在滯環(huán)電流控制法中,測量電流和參考電流之間的誤差與滯環(huán)帶進(jìn)行比較,滯環(huán)帶如圖8-32a所示。如果電流誤差在滯環(huán)帶內(nèi),則PWM輸出保持不變。如果電流誤差超出了滯環(huán)帶,PWM會輸出一個(gè)反向的作用,以di/dt的梯度變化。從數(shù)學(xué)的角度來講,PWM的輸出可以表示為:
純電動汽車電機(jī)驅(qū)動系統(tǒng)的電流控制方法
如果PWM輸出信號為“0”,指的是斷開控制相的電壓源,使電流衰減;如果PWM輸出信號為“1”,指的是閉合控制相的電壓源,使電流變大。電壓會強(qiáng)制電流這樣變化,使其保持在滯環(huán)內(nèi)。
這種控制方法的優(yōu)點(diǎn)是電流誤差始終保持在一定的帶寬內(nèi),這個(gè)帶寬也是用戶事先知道的。在滯環(huán)電流控制方法中,開關(guān)頻率是不知道的,這樣就會使得設(shè)計(jì)濾波器變得比較困難。對開關(guān)頻率應(yīng)該仔細(xì)進(jìn)行監(jiān)測,以免超出逆變器的極限。在實(shí)際使用時(shí),通常會設(shè)定開關(guān)頻率的上限,以免超出逆變器開關(guān)頻率的最大極限。滯環(huán)的帶寬通常是根據(jù)功率器件的開關(guān)頻率來設(shè)計(jì)的。如果滯環(huán)帶寬選得非常窄,那么開關(guān)頻率就需要非常高,同時(shí)不能超出功率器件的最大開關(guān)頻率。另一方面,如果帶寬比較寬的話,電流誤差將會非常大。
滯環(huán)電流控制法可以應(yīng)用于三相PWM逆變器,每一相都有一個(gè)PWM控制器。如果實(shí)際電流比參考電流高出滯環(huán)帶寬的一半,橋式逆變器的低壓端將會閉合,以減小相電流。三相滯環(huán)控制也有一個(gè)難點(diǎn),根據(jù)滯環(huán)控制,對各相開關(guān)狀態(tài)的要求可能會有沖突。當(dāng)考慮三相系統(tǒng)滯環(huán)控制與各相獨(dú)立的滯環(huán)控制之間的相互關(guān)系時(shí),難度就更大了。這個(gè)難點(diǎn)造成的結(jié)果是電流可能無法保持在滯環(huán)帶寬內(nèi)。
例如,有一個(gè)指令需要a相電流增加,需要使用b相或者c相的低壓端作為回路,而如果恰在此時(shí)b相或者c相的高壓端正在閉合,這樣a相電流就無法跟隨指令使電流增加。在這種情況下,a相電流的誤差就有可能超出滯環(huán)的帶寬。使用dq變換理論,可以首先將三相電流變換為兩相dq電流,然后在dq參考系中使用滯環(huán)電流控制。
斜坡交截控制法
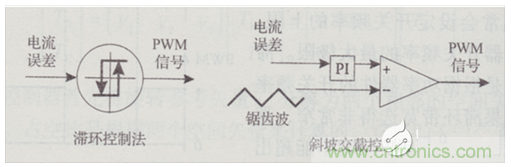
控制定子電流還有另外一種方法,這種方法的控制器基于固定頻率的斜坡信號,而且斜坡信號決定了開關(guān)頻率。電流誤差首先傳給一個(gè)線性控制器,典型的線性控制器為比例積分( PI)型。線性控制器的輸出結(jié)果與一個(gè)高頻鋸齒形三角波信號相比較,然后輸出PWM開關(guān)信號。如果誤差信號比三角波信號高,PWM輸出信號為“1”,否則輸出信號為“0”,控制過程如圖b所示。為了減小電流誤差,定子電壓是不斷變化的。在三相系統(tǒng)中使用3個(gè)同樣的控制器。

斜坡交截控制法開關(guān)頻率固定,其頻率由鋸齒波的頻率決定,這樣就可以很容易確保不會超過逆變器的開關(guān)頻率。在斜坡交截控制法中可以調(diào)整很多參數(shù),因此與滯環(huán)電流控制法相比,其具有更大的靈活性。斜坡交截控制法的控制參數(shù)包括線性控制器的增益以及鋸齒波的頻率和幅值,而滯環(huán)電流控制法的控制參數(shù)只有滯環(huán)的帶寬。這兩種控制方法的功能差異如圖所示。
斜坡交截控制法最主要的缺點(diǎn)是由于傳輸延遲使得響應(yīng)時(shí)間變長。這種情況可以通過兩種方法來加以改善,一種方法為用一個(gè)高增益的比例控制器替換PI控制器;另一種方法為提高鋸齒波信號的開關(guān)頻率。



