

【導(dǎo)讀】近年來,汽車中的電子成分不斷提升,幫助提升燃油經(jīng)濟(jì)性,減少排放,增強(qiáng)安全、照明、車載網(wǎng)絡(luò)及信息娛樂系統(tǒng)等。其中,汽車前照燈是安全駕駛的一個(gè)重要環(huán)節(jié),安森美半導(dǎo)體創(chuàng)新及領(lǐng)先行業(yè)的汽車自適應(yīng)前照燈系統(tǒng)(AFS)電機(jī)驅(qū)動(dòng)方案克服傳統(tǒng)前照燈的局限,幫助提升行車安全性。
近年來,汽車中的電子成分不斷提升,幫助提升燃油經(jīng)濟(jì)性,減少排放,增強(qiáng)安全、照明、車載網(wǎng)絡(luò)及信息娛樂系統(tǒng)等。其中,汽車前照燈是安全駕駛的一個(gè)重要環(huán)節(jié),安森美半導(dǎo)體創(chuàng)新及領(lǐng)先行業(yè)的汽車自適應(yīng)前照燈系統(tǒng)(Adaptive Front-lighting System, AFS)電機(jī)驅(qū)動(dòng)方案克服傳統(tǒng)前照燈的局限,幫助提升行車安全性。本文分析AFS的特性,介紹安森美半導(dǎo)體的AFS方案,以及應(yīng)用設(shè)計(jì)要點(diǎn),幫助客戶應(yīng)用汽車AFS方案。
自適應(yīng)前照燈系統(tǒng)(AFS)的應(yīng)用優(yōu)勢(shì)及工作原理
傳統(tǒng)汽車前照燈的燈光跟車身方向始終一致,在汽車轉(zhuǎn)彎時(shí)無法有效照明彎道內(nèi)側(cè)的盲區(qū),如果彎道內(nèi)側(cè)恰好存在人或物體,而車速又未恰當(dāng)降低,則會(huì)帶來安全隱患,如圖1所示。相比較而言,AFS功能可以提供旋轉(zhuǎn)(swiveling)調(diào)節(jié)效果,能夠根據(jù)方向盤的角度轉(zhuǎn)動(dòng),把有效的光束投射到駕駛者需要看清的前方路面上,幫助降低安全隱患。

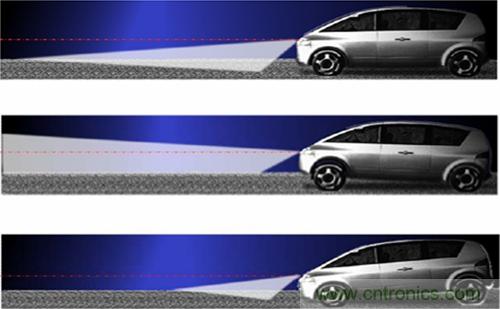
圖1:AFS功能的旋轉(zhuǎn)調(diào)節(jié)(左圖)及水平調(diào)節(jié)(右圖)照明效果
除了能夠進(jìn)行動(dòng)態(tài)旋轉(zhuǎn)調(diào)節(jié),AFS功能還能提供動(dòng)態(tài)水平高度調(diào)節(jié)。此功能根據(jù)負(fù)載軸傳感器的信號(hào)來調(diào)節(jié)前照燈的水平高度,可以適應(yīng)不同的負(fù)載及不同的斜坡環(huán)境。如圖1右側(cè)中,上圖是AFS功能在正常水平條件下的燈光投身效果,中圖是在汽車啟動(dòng)或上坡時(shí)路面顛簸條件下燈光上揚(yáng)效果,下圖是在剎車或下坡條件下的燈光水平下沉照明效果。可見AFS可根據(jù)車身水平傾斜情況動(dòng)態(tài)調(diào)節(jié)燈光高度,改善照明效果,增強(qiáng)安全性。AFS工作原理結(jié)構(gòu)圖分別如圖2和圖3所示。
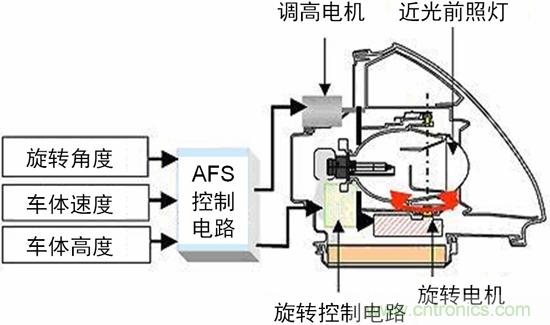
圖2:AFS的工作原理結(jié)構(gòu)圖
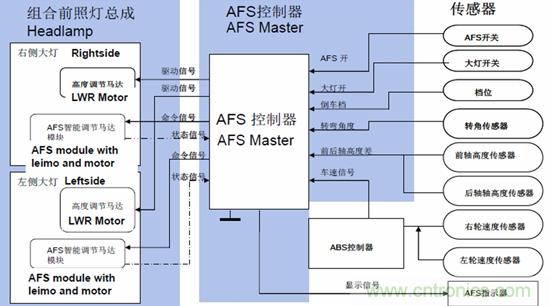
圖3:AFS的工作原理結(jié)構(gòu)圖(續(xù))
步進(jìn)電機(jī)驅(qū)動(dòng)器的安放位置選擇
汽車AFS的旋轉(zhuǎn)及水平高度調(diào)節(jié),是各使用一個(gè)步進(jìn)電機(jī)來實(shí)現(xiàn)的,電機(jī)根據(jù)車輛四周的眾多傳感器反饋的數(shù)據(jù)作出反應(yīng),故設(shè)計(jì)人員需要采用適合的步進(jìn)電機(jī)驅(qū)動(dòng)方案,且安放在適合的位置。
控制AFS功能的步進(jìn)電機(jī)驅(qū)動(dòng)器的安放位置有兩種選擇。一種方法稱為直接驅(qū)動(dòng),典型產(chǎn)品如NCV70522。這種方案中,步進(jìn)電機(jī)驅(qū)動(dòng)芯片安裝在跟主微控制器(MCU)同一印制電路板(PCB)上。此電路板離前照燈部件及相關(guān)步進(jìn)電機(jī)較遠(yuǎn),而每個(gè)電機(jī)需要與對(duì)應(yīng)的信號(hào)連接。
另一種方法是機(jī)電一體化,典型產(chǎn)品如AMIS-30623。在這種方法中,步進(jìn)電機(jī)驅(qū)動(dòng)IC能夠直接安裝在步進(jìn)電機(jī)結(jié)構(gòu)內(nèi),僅需共享地線與LIN總線信號(hào)連接。這種方法極為有益,因?yàn)镸CU與機(jī)電一體化模塊的接口連接只需要低電磁兼容性的總線。機(jī)電一體化方法采用模塊化設(shè)計(jì),前照燈組件的維修保養(yǎng)方便,好處明顯。這兩種方法的結(jié)構(gòu)示意圖如圖4所示。
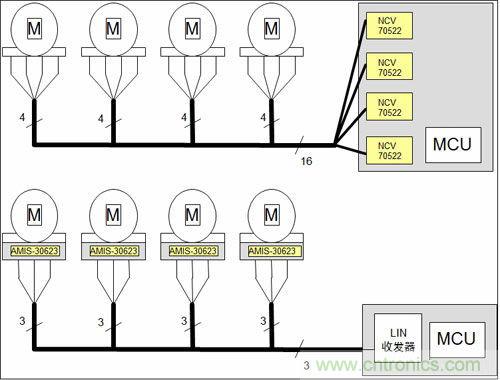
圖4:兩種不同的步進(jìn)電機(jī)驅(qū)動(dòng)器安放方法
安森美半導(dǎo)體主要AFS步進(jìn)電機(jī)驅(qū)動(dòng)器產(chǎn)品及關(guān)鍵特性
安森美半導(dǎo)體提供多種多樣的步進(jìn)電機(jī)驅(qū)動(dòng)器產(chǎn)品,如AMIS-30621、AMIS-30623、NCV70627、NCV70521及 NCV70522等。這些產(chǎn)品中, AMIS-30621、AMIS-30623及NCV70627采用LIN通信,而NCV70521及 NCV70522采用SPI通信。其中,AMIS-30623是一款單芯片微步進(jìn)電機(jī)驅(qū)動(dòng)器。它是通過LIN建立與主機(jī)遠(yuǎn)程連接的專用機(jī)電一體化方案。該芯片通過總線接收定位指令,隨后驅(qū)動(dòng)電機(jī)線圈到所需位置,可配置電流、速度、加速度和減速度等參數(shù)。該芯片自帶電機(jī)堵轉(zhuǎn)偵測(cè)。
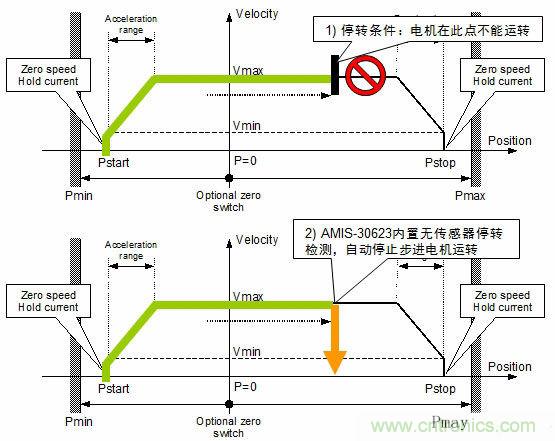
圖5:AMIS-30623的工作原理示意圖
NCV70522則是一款帶穩(wěn)壓器及看門狗功能的SPI通信步進(jìn)電機(jī)驅(qū)動(dòng)IC。這單芯片微步進(jìn)電機(jī)驅(qū)動(dòng)器具有輸出電流選擇性、SPI接口、嵌入式5V穩(wěn)壓器和看門狗復(fù)位等特性。該芯片接收通過一個(gè)輸入引腳脈沖信號(hào)啟動(dòng)“下一步微步”命令,輸出線圈電流、微步數(shù)等參數(shù)。集成的SPI總線允許參數(shù)設(shè)定及診斷反饋。NCV70522的典型應(yīng)用電路圖如圖6所示。
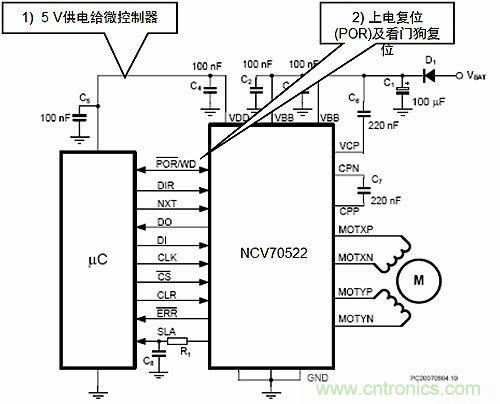
圖6:NCV70522典型應(yīng)用電路圖
NCV70522應(yīng)用設(shè)計(jì)要點(diǎn)
我們以NCV70522為例,介紹這芯片在AFS應(yīng)用中的設(shè)計(jì)要點(diǎn)。NCV70522的控制要素包括步幅模式、NXT輸入及電機(jī)運(yùn)轉(zhuǎn)方向(DIR)控制等。
1) SLA信號(hào)特性
NCV70522包含速度及負(fù)載角(SLA)輸出,配合創(chuàng)建停轉(zhuǎn)檢測(cè)算法及控制環(huán)路,以根據(jù)電機(jī)的反電動(dòng)勢(shì)(BEMF)來調(diào)節(jié)轉(zhuǎn)矩和速度。
2) SPI寄存器
NCV70522采用標(biāo)準(zhǔn)4線SPI通信(CLK, CSB, DI, DO),包含3個(gè)8位控制(Control)寄存器(0, 1, 2)和4個(gè)8位狀態(tài)(Status)寄存器(0, 1, 2, 3)。
3)復(fù)位
CLR引腳為低電平(0)時(shí),器件在正常模式;CLR引腳為高電平(1)時(shí),器件復(fù)位。復(fù)位號(hào)器件內(nèi)部寄存器值被清除為初始化值。
4) 設(shè)置線圈輸出電流
NCV70522提供多種輸出電流模式,可以通過SPI來對(duì)寄存器CUR[4:0]設(shè)定來選擇。更改后的電流會(huì)在下一個(gè)脈寬調(diào)制(PWM)周期更新。
5) 步幅設(shè)定
NCV70522提供從整步到32微步共7種中模式供選擇,可以通過SPI對(duì)寄存器SM[2:0]來設(shè)定。
6) NXT控制
NXT信號(hào)用于控制電機(jī)的步幅(step)位置,根據(jù)電流表對(duì)應(yīng)的Ix和Iy信息,進(jìn)入下一步(step)。即使電機(jī)運(yùn)轉(zhuǎn)沒有啟用時(shí),step位置一樣被改變,只是Ix,Iy不輸出。
7) 堵轉(zhuǎn)檢測(cè)
AFS應(yīng)用中步進(jìn)電機(jī)有時(shí)可能會(huì)堵轉(zhuǎn)。一旦電機(jī)堵轉(zhuǎn),電子控制單元(ECU)將失去前照燈位置的跟蹤信息并作出不恰當(dāng)?shù)姆磻?yīng),滋生極嚴(yán)重的安全問題,所以AFS應(yīng)用中堵轉(zhuǎn)檢測(cè)是必不可少。
NCV70522微步步進(jìn)電機(jī)驅(qū)動(dòng)器透過SLA引腳提供BEMF輸出,這表示它能實(shí)時(shí)進(jìn)行停轉(zhuǎn)檢測(cè)計(jì)算,并根據(jù)不同條件來調(diào)節(jié)檢測(cè)等級(jí)。具體而言,此BEMF電壓在每個(gè)所謂的“線圈電流過零”期間采樣。每個(gè)線圈在每個(gè)電氣周期內(nèi)存在2個(gè)零電流位置,因而每個(gè)電氣周期共有4個(gè)過零觀察點(diǎn),故可以測(cè)量4次BEMF。如果4個(gè)“線圈電流過流點(diǎn)”中有2個(gè)SLA電平低于1.5 V,那么就處于堵轉(zhuǎn)狀態(tài)。我們需要連續(xù)2個(gè)以上的電氣周期都認(rèn)定為堵轉(zhuǎn)才為真正堵轉(zhuǎn)。
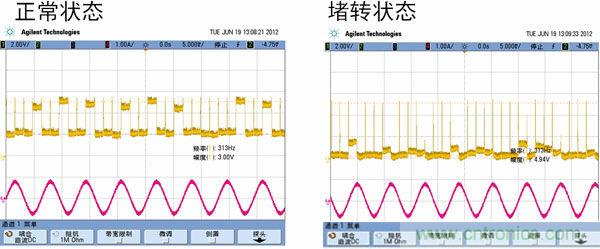
圖7:NCV70522的堵轉(zhuǎn)檢測(cè)功能
總結(jié):
自適應(yīng)前照明系統(tǒng)(AFS)在智能汽車電子產(chǎn)品中應(yīng)用越來越廣泛,通過驅(qū)動(dòng)步進(jìn)電機(jī)來實(shí)時(shí)控制燈光角度調(diào)整,能有效地增加駕駛的安全性。安森美半導(dǎo)體針對(duì)AFS系統(tǒng)的步進(jìn)電機(jī)開發(fā)了一系列驅(qū)動(dòng)芯片,為客戶的設(shè)計(jì)增強(qiáng)汽車的安全性。本文介紹了AFS特性、驅(qū)動(dòng)IC以及方案設(shè)計(jì)要點(diǎn),特別是步進(jìn)電機(jī)驅(qū)動(dòng)難點(diǎn)—堵轉(zhuǎn)檢測(cè)的剖析,幫助客戶快速、準(zhǔn)確地開發(fā)有效的AFS方案。來源:電子發(fā)燒友。
【推薦閱讀】



