

【導(dǎo)讀】集成式射頻 (RF) 捷變收發(fā)器不僅廣泛用于蜂窩電話基站的軟件定義無線電 (SDR)1架構(gòu),如多業(yè)務(wù)分布式接入系統(tǒng) (MDAS) 和小基站單元等,也適用于工業(yè)、商業(yè)以及軍事應(yīng)用中的無線高清視頻傳輸,如無人飛行器 (UAV) 應(yīng)用。
本文將剖析使用AD9361/AD93642,3集成式收發(fā)器IC實現(xiàn)寬帶無線視頻信號鏈的過程,以及傳輸?shù)臄?shù)據(jù)量、相應(yīng)的RF占用信號帶寬、傳輸距離和發(fā)射功率。文中還將描述OFDM物理層的實現(xiàn),并列出用于避免射頻干擾的跳頻時間測 試結(jié)果。最后,我們將討論Wi-Fi和RF捷變收發(fā)器在寬帶無線應(yīng)用方面的優(yōu)缺點。
信號鏈
圖1所示為采用AD9361/AD9364和BBIC的簡化無線視頻傳輸方案。攝像機捕捉到影像,并通過以太網(wǎng)、HDMI®、USB或其他接口將視頻數(shù)據(jù)發(fā)送至基帶處理器。圖像編碼/解碼可通過硬件或FPGA處理。RF前端包括RF開關(guān)以及連接到可編程集成式收發(fā)器的LNA和PA。
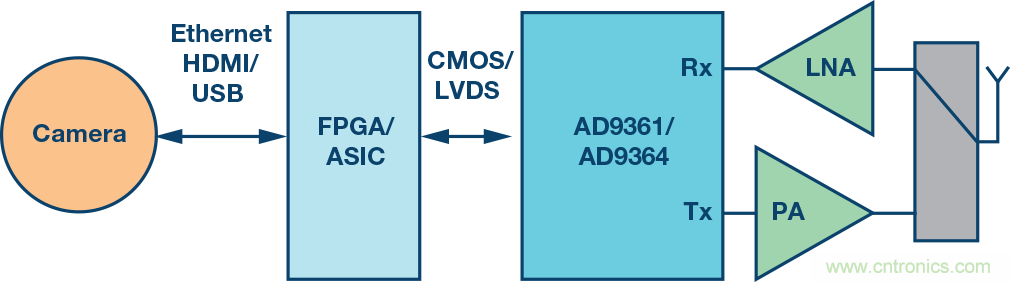
圖1. 無線視頻傳輸示意圖。
需要傳輸多少數(shù)據(jù)
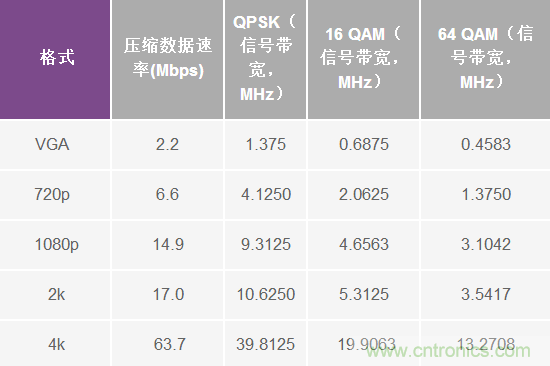
表1列出了未壓縮數(shù)據(jù)速率和壓縮數(shù)據(jù)速率之間的顯著差異。通過使用高效視頻編碼 (HE VC) 技術(shù),也就是H.265和MPEG-H第2部分,可以降低數(shù)據(jù)速率并節(jié)省帶寬。H.264是目前最常用于錄像、壓縮及視頻內(nèi)容分布的格式。它體現(xiàn)了視頻壓縮技術(shù)的巨大進步,并且在未來有可能接替現(xiàn)已廣泛使用的AVC(H.264和MPEG-4第10部分)技術(shù)。
表1總結(jié)了不同視頻格式下的未壓縮和已壓縮數(shù)據(jù)速率。其假設(shè) 條件是視頻的位深度為24位,幀速率為60 fps。在1080p的例子中, 壓縮后的數(shù)據(jù)速率為14.93 Mbps,這樣的數(shù)據(jù)率才會更加容易地被 基帶處理器和無線物理層進行處理。
表1. 壓縮數(shù)據(jù)速率

信號帶寬
通過改變采樣速率、數(shù)字濾波器和抽取參數(shù),AD9361/AD9364可支持的通道帶寬范圍為低于200 kHz到56 MHz。AD9361/AD9364為 零中頻收發(fā)器,具有用來發(fā)射復(fù)數(shù)數(shù)據(jù)的I通道和Q通道。復(fù)數(shù)數(shù)據(jù)含有實部和虛部,分別對應(yīng)I通道和Q通道,它們位于同一頻帶上,因此其頻譜效率是單通道頻譜效率的兩倍。壓縮視頻數(shù)據(jù)可以映射到I和Q通道以創(chuàng)建星座點,也就是符號。圖2顯示了一個16QAM的例子,每個星座點符號代表四個二進制比特。
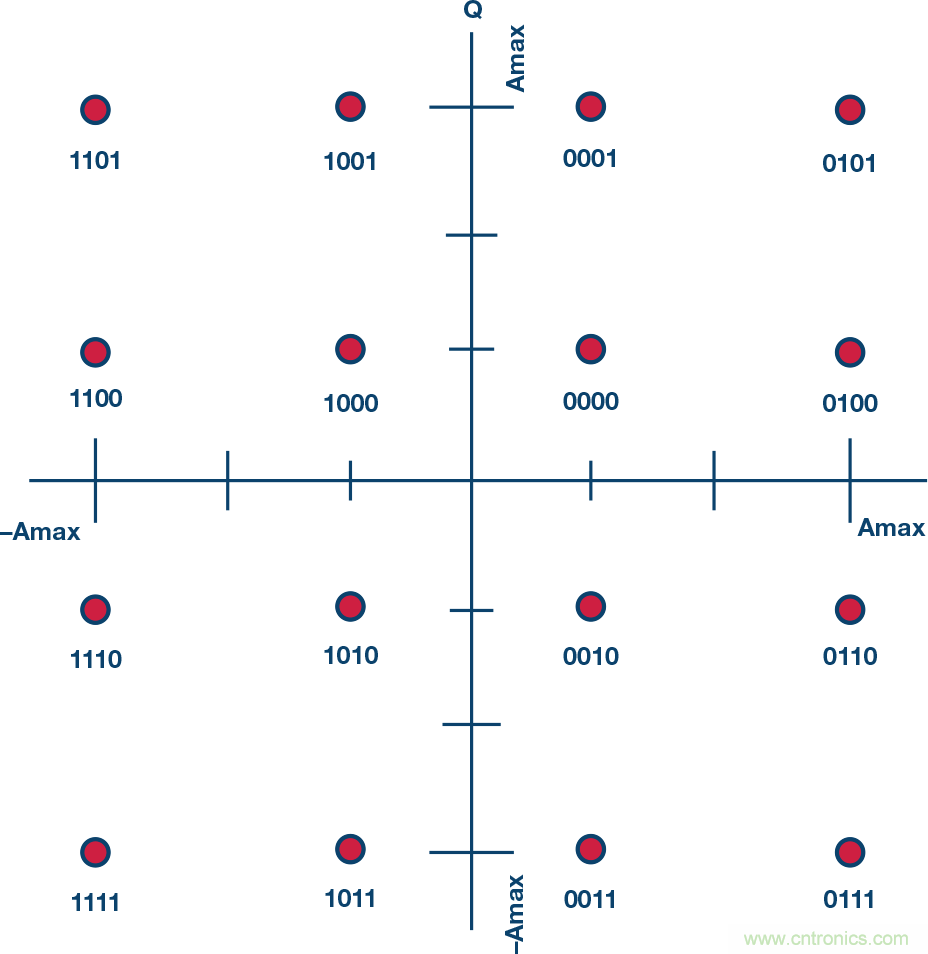
圖2. 16 QAM星座圖。4
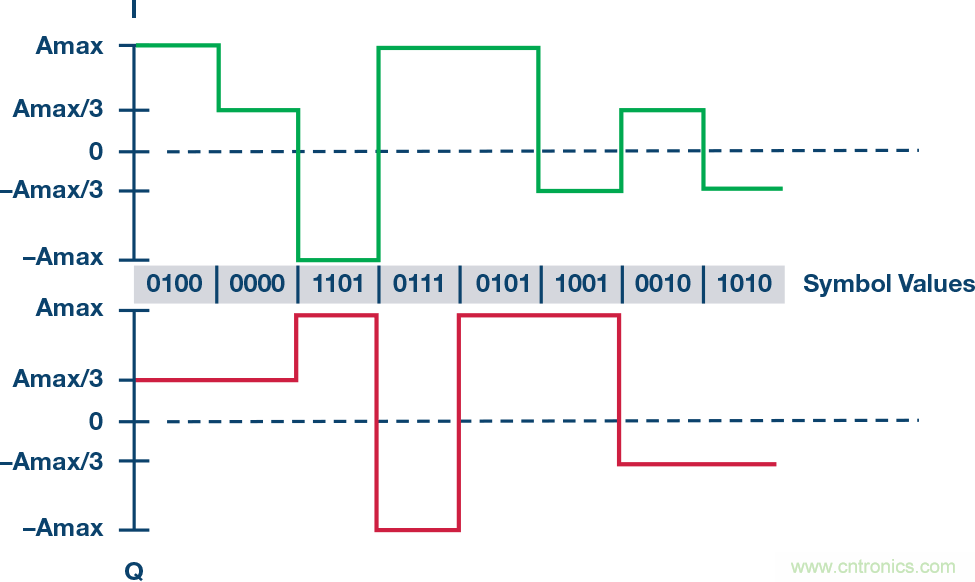
圖3. 星座圖中I和Q數(shù)字波形。4
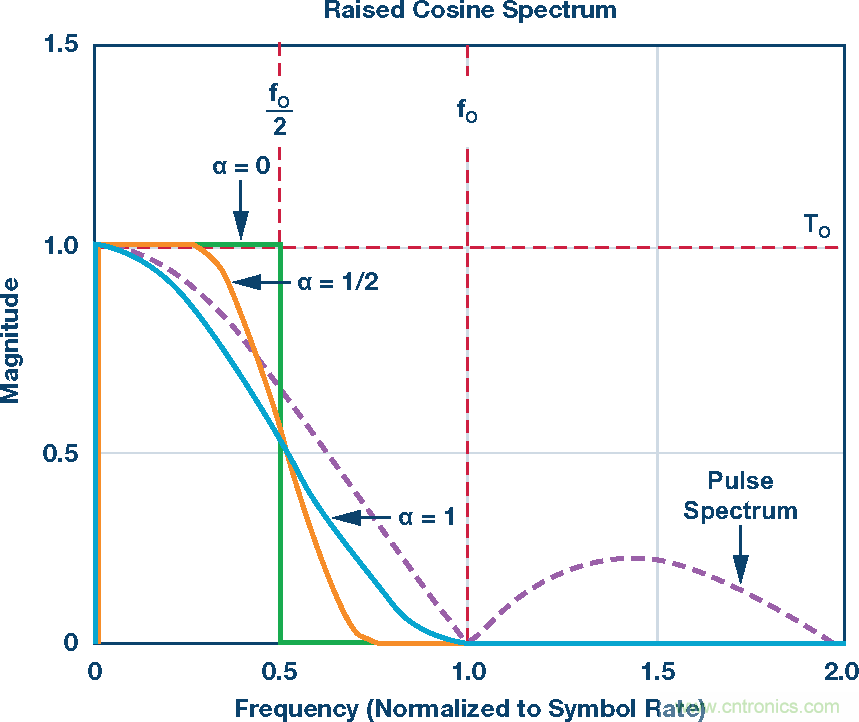
圖4. 脈沖整形濾波器響應(yīng)。4
對于單載波系統(tǒng),I和Q數(shù)字波形在進入DAC之前需要通過脈沖整形濾波器,使所傳輸?shù)男盘栐谟邢迬拑?nèi)成形。脈沖整形可使用FIR濾波器,濾波器響應(yīng)如圖4所示。為了確保信息逼真度,必須滿足對應(yīng)于符號速率的最小信號帶寬。符號速率與壓縮視頻數(shù)據(jù)成正比,如下式所示。對于OFDM系統(tǒng),應(yīng)使用IFFT將復(fù)數(shù)數(shù)據(jù)調(diào)制到各個子載波上,使其在有限帶寬內(nèi)傳輸信號。
每個符號對應(yīng)的位數(shù)取決于調(diào)制階數(shù)。
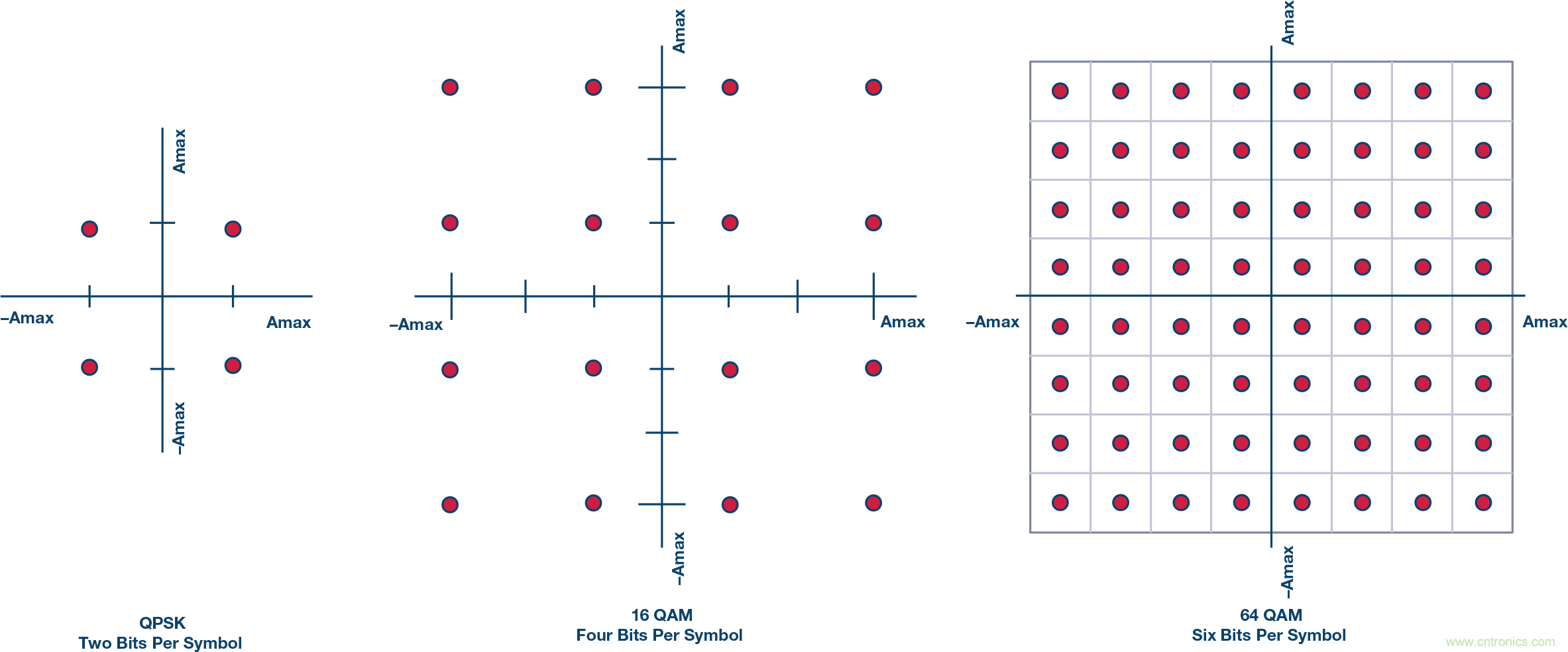
圖5. 調(diào)制階數(shù)。
所占用信號帶寬為
其中α表示濾波器的帶寬參數(shù)。
根據(jù)前面的公式,可以推導(dǎo)出

從而,我們可以計算出RF占用信號帶寬,如表2中的總結(jié)所示。
表2.各種調(diào)制階數(shù)的RF占用信號帶寬 (α = 0.25)
AD9361/AD9364可實現(xiàn)56 MHz信號帶寬,支持表2中所有視頻格式的傳輸,并且支持更高的幀速率。高階調(diào)制占用的帶寬更小,每個碼元可表示更多的信息/位,但是解調(diào)所需的信噪比 (SNR) 更高。
傳輸距離和發(fā)射器功率
在無人飛行器等應(yīng)用中,最大傳輸距離是一個關(guān)鍵參數(shù)。但是,保持通信不中止同樣很重要,即使距離較小時也是如此。氧氣、水和其他障礙物(自由空間衰減除外)可能會使信號衰減。
圖6顯示了無線通信通道損耗的模型。
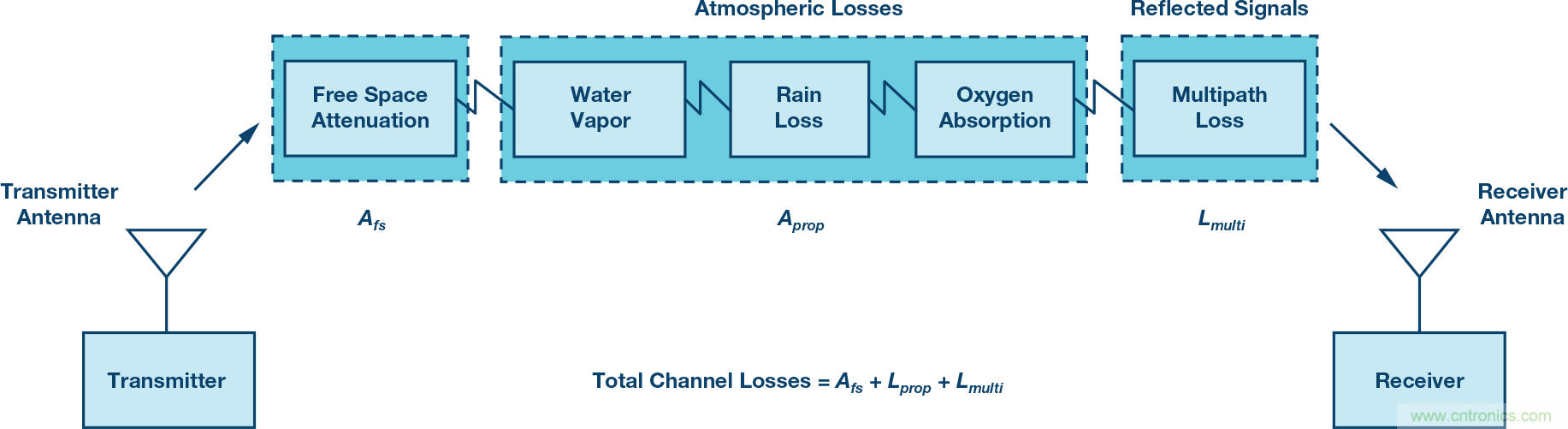
圖6. 無線通信通道損耗模型。5
通常將解調(diào)或恢復(fù)發(fā)射器信息所需的最小輸入信號 (Smin) 作為接 收器靈敏度。獲得接收器靈敏度后,結(jié)合某些假設(shè)條件可計算出 最大傳輸距離,如下所示:
(S/N)min表示處理信號所需的最小信噪比
NF表示接收器的噪聲系數(shù)
k表示玻爾茲曼常數(shù),1.38 × 10–23 joule/k
T0表示接收器輸入的絕對溫度(開爾文) = 290 K
B表示接收器帶寬(單位Hz)
參數(shù)(S/N)min與調(diào)制/解調(diào)階數(shù)相關(guān)。在相同的信噪比下,低階調(diào)制可得到更低的誤碼率,而在相同的誤碼率下,高階調(diào)制需要更高的信噪比來解調(diào)。因此,如果發(fā)射器離接收器很遠,則接收到的信號較弱,信噪比不足以支持高階解調(diào)。為了使發(fā)射器保持在線狀態(tài),并使視頻格式保持同一視頻數(shù)據(jù)速率,則基帶應(yīng)使用低階調(diào)制,其代價是增加帶寬。這樣有助于確保接收到的圖像清晰不模糊。幸運的是,我們可通過具有數(shù)字調(diào)制和解調(diào)功能的軟件定義無線電來改變調(diào)制方式。上述分析基于這樣的假設(shè)條件:發(fā)射器的RF功率保持恒定。在天線增益相同時,較大的RF發(fā)射功率將能達到更遠處具有相同接收靈敏度的接收器,盡管如此,最大發(fā)射功率應(yīng)符合FCC/CE輻射標(biāo)準(zhǔn)。
此外,載波頻率也會對傳輸距離產(chǎn)生影響。當(dāng)波在空間中傳播時,會發(fā)生散射損耗。自由空間損耗可由下式確定
其中R為距離,λ為波長,f為頻率,C為光速。因此,在相等的自由空間距離上,頻率越高,損耗越大。例如,相較于2.4 GHz,載波頻率為5.8 GHz時在相同傳輸距離上的衰減將超過7.66 dB。
RF頻率和頻率切換
AD9361/AD9364輸出覆蓋70 MHz至6 GHz的可編程頻率范圍。這將能滿足大多數(shù)NLOS頻率應(yīng)用,包括不同類型的特許執(zhí)照和免執(zhí)照頻段,比如1.4 GHz、2.4 GHz和5.8 GHz。
2.4 GHz頻段已廣泛用于Wi-Fi、Bluetooth®以及物聯(lián)網(wǎng) (IoT) 短程通信,因此變得越來越擁擠。該頻段用于無線視頻傳輸和控制信號將會增大信號干擾的幾率和不穩(wěn)定性。從而導(dǎo)致無人飛行器陷入不良情況,這些情況往往十分危險。使用頻率切換技術(shù)保持干凈的頻率通道,將確保數(shù)據(jù)和控制連接更可靠。當(dāng)發(fā)射器覺察到擁擠頻率時,它會自動切換到其他頻帶。例如,兩架同時使用相同頻率并且近距離工作的無人飛行器將會相互干擾對方的通信。自動切換LO頻率并重新選擇頻帶將有助于維持穩(wěn)定的無線鏈路。在上電期間自適應(yīng)選擇載波頻率或通道是高端無人飛行器的一個杰出特性。
跳頻
廣泛應(yīng)用于電子對抗 (ECM) 的快速跳頻技術(shù)也有助于避免干擾。通常情況下,如果我們想要跳頻,PLL需在程序執(zhí)行后重新鎖定。該過程包括寫頻率寄存器,然后經(jīng)過VCO校準(zhǔn)時間和PLL鎖定時間,因此跳頻間隔約為幾百微秒。圖7顯示了跳頻發(fā)射器的LO頻率從816.69 MHz跳變至802.03 MHz的例子。AD9361用于正常頻率變化模式,發(fā)射器RF輸出頻率從814.69 MHz跳變至800.03 MHz,參考頻率為10 MHz。跳頻時間通過E5052B測得,如圖7所示。根據(jù)圖7b,VCO校準(zhǔn)和PLL鎖定時間約為500 μs。信號源分析儀E5052B可用來捕捉PLL的瞬態(tài)響應(yīng)。圖7a顯示了瞬態(tài)測量的寬帶模式,而圖7b和7d以顯著高分辨率顯示了跳頻時的頻率和相位瞬態(tài)測量值。6圖7c則顯示了輸出功率響應(yīng)。
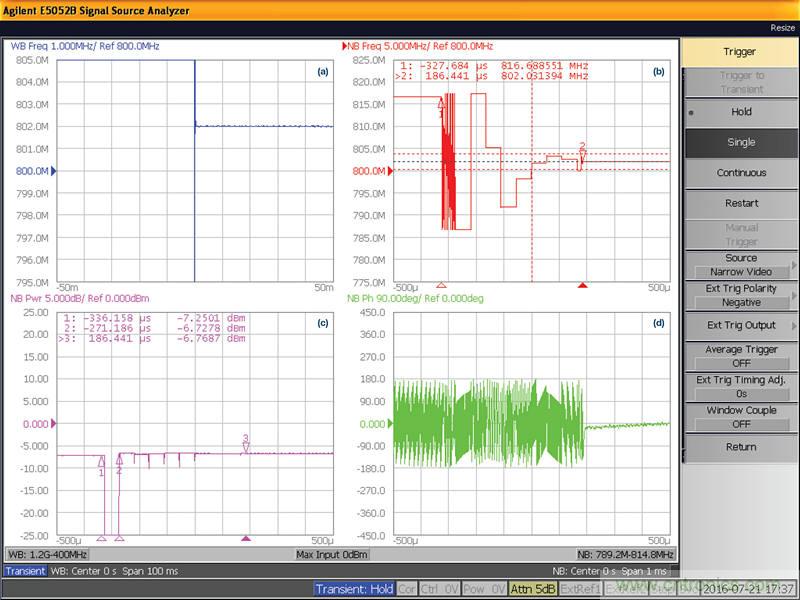
圖7. 頻率從804.5 MHz跳變至802 MHz,歷時500 μs。
500 μs對于跳頻應(yīng)用來說是一段很長的時間間隔。不過,AD9361/ AD9364支持一種快速鎖定模式,通過將合成器編程信息集(稱為 配置文件)存入器件寄存器或基帶處理器的存儲空間,可使該過 程比正常頻率變化更快。圖8顯示了通過快速鎖定模式使頻率從 882 MHz跳變至802 MHz的測試結(jié)果。根據(jù)圖8d的相位響應(yīng),該時 間可縮短至20 μs以下。相位曲線參照802 MHz的相位繪制。由于頻 率信息和校準(zhǔn)結(jié)果均已保存在配置文件中,因此省去了SPI寫入時 間和VCO校準(zhǔn)時間。我們可以看到,圖8b顯示了AD9361/AD9364的 快速跳頻性能。
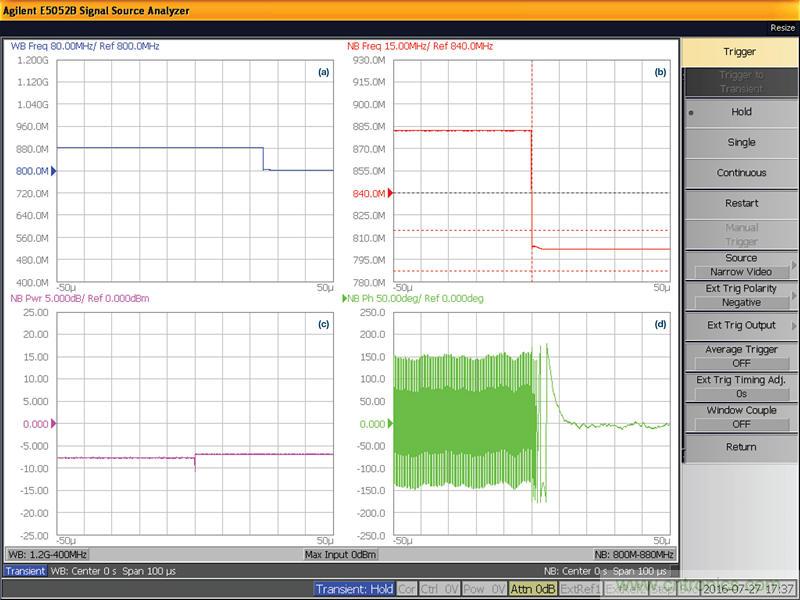
圖8. 在快速鎖定模式下,頻率在20 μs內(nèi)從882 MHz跳變至802 MHz。
物理層的實現(xiàn)—OFDM
正交頻分多路復(fù)用 (OFDM) 是一種信號調(diào)制技術(shù),可將高數(shù)據(jù)速率 調(diào)制流劃分到多個緩慢調(diào)制的窄帶密集的子載波上。因此,信號 不易受到選擇性頻率衰減的影響。其缺點是峰均功率比較高,并 且對載波偏移和漂移比較敏感。OFDM廣泛應(yīng)用于寬帶無線電通 信物理層。OFDM的關(guān)鍵技術(shù)包括IFFT/FFT、頻率同步、采樣時間同步、碼元/幀同步。IFFT/FFT可通過FPGA以最快方式實現(xiàn)。子載波間 隔的選擇也十分重要。該間隔不應(yīng)太小,應(yīng)足以對抗運動通信中 的多普勒頻移;但也不應(yīng)太大,以便在有限的頻率帶寬內(nèi)攜帶更 多碼元符號,從而提高頻譜效率。COFDM是指編碼技術(shù)和OFDM調(diào) 制的結(jié)合。COFDM對信號衰減的承受能力較強,并且具有前向糾 錯 (FEC) 功能,因此可以從任何移動對象發(fā)送視頻信號。其編碼技 術(shù)將會增大信號帶寬,但此代價通常是值得的。
通過將MathWorks基于模型的設(shè)計和自動生成代碼工具與強大的 Xilinx® Zynq SoC以及ADI公司的集成式射頻 (RF) 收發(fā)器相結(jié)合,SDR 系統(tǒng)的設(shè)計、驗證、測試和實現(xiàn)可以比以前更高效,進而提高無線 電系統(tǒng)的性能并縮短上市時間。7
相較于Wi-Fi具有哪些優(yōu)勢?
配備Wi-Fi的無人飛行器可以很容易地連接到手機、筆記本電腦和 其他移動設(shè)備,因此使用起來非常方便。但是,對于無人飛行器應(yīng) 用中的無線視頻傳輸,F(xiàn)PGA和AD9361解決方案具有很多勝過Wi-Fi 的優(yōu)點。首先,AD9361/AD9364在物理層可通過捷變頻率切換和快 速跳頻避免干擾。而大多數(shù)集成Wi-Fi芯片仍工作于擁擠的2.4 GHz 頻帶,沒有頻帶選擇機制來確保更穩(wěn)定地?zé)o線連接。
其次,若采用FPGA和AD9361解決方案,可由設(shè)計工程師靈活定義 和開發(fā)傳輸協(xié)議。而Wi-Fi協(xié)議為標(biāo)準(zhǔn)協(xié)議,基于每個數(shù)據(jù)包的雙 向握手機制。在使用Wi-Fi時,每個數(shù)據(jù)包必須確認(rèn)該包已收到并且包中512字節(jié)數(shù)據(jù)在收到時完整無缺。如果丟失一個字節(jié),則整個512字節(jié)數(shù)據(jù)包必須重新發(fā)送。8雖然該協(xié)議能夠確保數(shù)據(jù)的可靠性,但重新建立無線數(shù)據(jù)鏈路的過程非常復(fù)雜且費時。TCP/IP協(xié)議帶來的高延遲將會造成非實時視頻和控制,從而可能導(dǎo)致無人飛行器墜落。而SDR解決方案(FPGA加AD9361)使用一個單向數(shù)據(jù)流,也就是說,空中的無人飛行器可像電視廣播一樣傳輸視頻信號。當(dāng)目標(biāo)是獲取實時視頻時,就沒有重新發(fā)送數(shù)據(jù)包的時間。
再者,對于很多應(yīng)用,Wi-F i不能保證適當(dāng)?shù)陌踩燃?。FPG A加AD9361/AD9364解決方案利用加密算法和自定義協(xié)議,因此不易受到安全威脅的影響。
與此同時,單向廣播數(shù)據(jù)流可實現(xiàn)的傳輸距離是Wi-Fi傳輸距離的兩至三倍。8軟件定義無線電的靈活性使得數(shù)字調(diào)制/解調(diào)可以根據(jù)距離需求而調(diào)整,并且適應(yīng)復(fù)雜空間輻射環(huán)境中變化的SNR。
結(jié)論
本文闡述了使用FPGA和AD9361/AD9364解決方案實現(xiàn)高清無線視頻傳輸?shù)年P(guān)鍵參數(shù)。憑借捷變頻段切換和快速跳頻技術(shù),可建立一個更穩(wěn)定、可靠的無線鏈路,以對抗空間中日益復(fù)雜的輻射環(huán)境并減小墜落幾率。在協(xié)議層,該解決方案使用單向傳輸以縮減無線鏈路的建立時間并實現(xiàn)低延遲連接,因此更靈活。在農(nóng)業(yè)生產(chǎn)、電力線檢查及監(jiān)督等工商業(yè)應(yīng)用中,穩(wěn)定、安全和可靠的傳輸是成功的關(guān)鍵。
參考電路
1 ADI的軟件定義無線電解決方案。ADI公司。
2 AD9361數(shù)據(jù)手冊。ADI公司。
3 AD9364數(shù)據(jù)手冊。ADI公司。
4 Ken Gentile. 應(yīng)用筆記AN-922:數(shù)字脈沖整形濾波器基本知識。ADI公司。
5Scott R. Bullock。數(shù)字通信的收發(fā)器和系統(tǒng)設(shè)計,第4版。SciTech Publishing,Edison,NJ,2014。
6 E5052B信號源分析儀,高級相位噪聲和瞬態(tài)測量技術(shù)。安捷倫公司,2007年。
7 Di Pu, Andrei Cozma, and Tom Hill. “快速通往量產(chǎn)的四個步驟:利用基于模型的設(shè)計開發(fā)軟件定義無線電。”模擬對話,第49卷, 2015年。
8 John Locke. “DJI Phantom 4的Lightbridge技術(shù)對比Yuneec TyphoonH的Wi-Fi技術(shù).” Drone Compares.
推薦閱讀:



