

【導(dǎo)讀】隨著高級駕駛員輔助系統(tǒng)(ADAS)促成自動駕駛,對機(jī)器視覺、查看、并行處理和數(shù)據(jù)記錄的聚合視頻傳感器數(shù)據(jù)多副本的需求越來越多。
前置機(jī)器視覺攝像頭更是需要多個(gè)副本,但它將很快適用于自主車輛的附加攝像頭、雷達(dá)和光線檢測/測距(LIDAR)傳感器。數(shù)據(jù)記錄是一個(gè)當(dāng)今非常常見的復(fù)制應(yīng)用(圖1)。在機(jī)器視覺應(yīng)用中,通常記錄某些行車狀況的原始傳感器數(shù)據(jù),以用于未來分析。這種情況下,擁有聚合原始傳感器數(shù)據(jù)的第二副本,并將其用于數(shù)據(jù)記錄,是大有裨益的;而另一個(gè)副本則用于機(jī)器視覺處理。

圖1:常見的ADAS數(shù)據(jù)記錄拓?fù)浣Y(jié)構(gòu)
復(fù)制聚合傳感器數(shù)據(jù)
數(shù)據(jù)復(fù)制可在視頻路徑中的不同位置進(jìn)行??赏ㄟ^單獨(dú)的電纜將每個(gè)傳感器連接到機(jī)器視覺和數(shù)據(jù)記錄電子控制單元(ECU),但這種方式使所需電纜的數(shù)量增加一倍。相反,在傳感器數(shù)據(jù)聚合之后拆分?jǐn)?shù)據(jù)反而變得更簡單。例如,DS90UB964-Q1四通道解串器集線器可聚合最多四個(gè)不同傳感器的原始數(shù)據(jù),并創(chuàng)建兩個(gè)組合數(shù)據(jù)副本,且無需諸如分離器和橋接芯片等的外部組件。機(jī)器視覺算法(例如對象識別)可以處理一個(gè)流,而另一個(gè)流被記錄到數(shù)據(jù)記錄存儲器中(圖2)。連接的傳感器無需全部相同;組合不同類型、分辨率和速度的多個(gè)傳感器可實(shí)現(xiàn)真正的傳感器融合系統(tǒng)。例如,可以合并不同幀速率的攝像機(jī)組合和單獨(dú)雷達(dá)傳感器的數(shù)據(jù)。
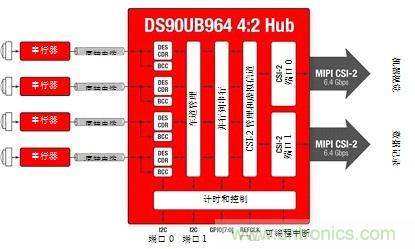
圖2:端口復(fù)制模式對于復(fù)制機(jī)器視覺處理和數(shù)據(jù)記錄操作的聚合傳感器數(shù)據(jù)流非常有用
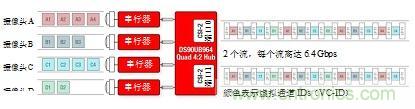
圖3所示為四攝像頭系統(tǒng),具有由彩色塊所示的不同數(shù)據(jù)速率。聚合數(shù)據(jù)在移動工業(yè)處理器接口(MIPI)攝像頭串行接口(CSI)-2端口0和1兩者處呈現(xiàn)。CSI-2總線具有“突發(fā)性”,意味著其以固定數(shù)據(jù)速率運(yùn)行、將發(fā)送數(shù)據(jù)為可用狀態(tài),并且當(dāng)機(jī)器空閑時(shí)恢復(fù)到低功率(LP)狀態(tài)。因此,傳感器速度可在不改變ECU處理器時(shí)序的條件下進(jìn)行變化。即使傳感器鏈路以獨(dú)立頻率運(yùn)行,解串器集線器在單個(gè)參考時(shí)鐘上也可將數(shù)據(jù)提供給片上系統(tǒng)(SoC)處理器,從而簡化系統(tǒng)時(shí)序。



