

【導(dǎo)讀】“雷達(dá)”是一種利用電磁波探測(cè)目標(biāo)位置的電子設(shè)備。電磁波其功能包括搜索目標(biāo)和發(fā)現(xiàn)目標(biāo);測(cè)量其距離,速度,角位置等運(yùn)動(dòng)參數(shù);測(cè)量目標(biāo)反射率,散射截面和形狀等特征參數(shù)。傳統(tǒng)的雷達(dá)是微波和毫米波波段的電磁波為載波的雷達(dá)。激光雷達(dá)以激光作為載波??梢杂谜穹㈩l率、相位和振幅來(lái)搭載信息,作為信息載體。

激光雷達(dá)利用激光光波來(lái)完成上述任務(wù)??梢圆捎梅窍喔傻哪芰拷邮辗绞剑@主要是一脈沖計(jì)數(shù)為基礎(chǔ)的測(cè)距雷達(dá)。還可以采用相干接收方式接收信號(hào),通過(guò)后置信號(hào)處理實(shí)現(xiàn)探測(cè)。激光雷達(dá)和微波雷達(dá)并無(wú)本質(zhì)區(qū)別,在原理框圖上也十分類(lèi)似,見(jiàn)下圖
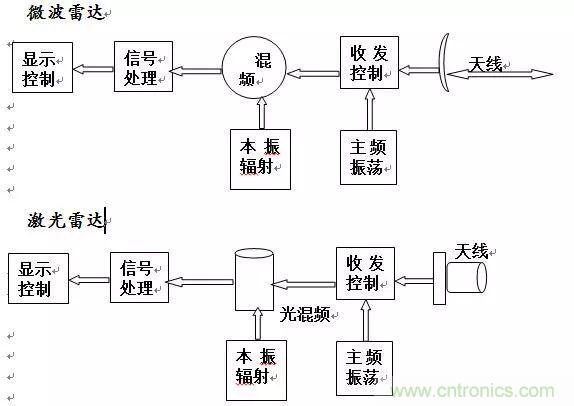
激光雷達(dá)是工作在光頻波段的雷達(dá)。與微波雷達(dá)的原理相似,它利用光頻波段的電磁波先向目標(biāo)發(fā)射探測(cè)信號(hào),然后將其接收到的同波信號(hào)與發(fā)射信號(hào)相比較,從而獲得目標(biāo)的位置(距離、方位和高度)、運(yùn)動(dòng)狀態(tài)(速度、姿態(tài))等信息,實(shí)現(xiàn)對(duì)目標(biāo)的探測(cè)、跟蹤和識(shí)別。
激光雷達(dá)由發(fā)射,接收和后置信號(hào)處理三部分和使此三部分協(xié)調(diào)工作的機(jī)構(gòu)組成。激光光速發(fā)散角小,能量集中,探測(cè)靈敏度和分辨率高。多普勒頻移大,可以探測(cè)從低速到高速的目標(biāo)。天線(xiàn)和系統(tǒng)的尺寸可以作得很小。利用不同分子對(duì)特定波長(zhǎng)得激光吸收、散射或熒光特性,可以探測(cè)不同的物質(zhì)成分,這是激光雷達(dá)獨(dú)有的特性。
激光雷達(dá)的種類(lèi)
目前,激光雷達(dá)的種類(lèi)很多,但是按照現(xiàn)代的激光雷達(dá)的概念,常分為以下幾種:
按激光波段分:有紫外激光雷達(dá)、可見(jiàn)激光雷達(dá)和紅外激光雷達(dá)。
按激光介質(zhì)分:有氣體激光雷達(dá)、固體激光雷達(dá)、半導(dǎo)體激光雷達(dá)和二極管激光泵浦固體激光雷達(dá)等。
按激光發(fā)射波形分:有脈沖激光雷達(dá)、連續(xù)波激光雷達(dá)和混合型激光雷達(dá)等。
按顯示方式分:有模擬或數(shù)字顯示激光雷達(dá)和成像激光雷達(dá)。
按運(yùn)載平臺(tái)分:有地基固定式激光雷達(dá)、車(chē)載激光雷達(dá)、機(jī)載激光雷達(dá)、船載激光雷達(dá)、星載激光雷達(dá)、彈載激光雷達(dá)和手持式激光雷達(dá)等。
按功能分:有激光測(cè)距雷達(dá)、激光測(cè)速雷達(dá)、激光測(cè)角雷達(dá)和跟蹤雷達(dá)、激光成像雷達(dá),激光目標(biāo)指示器和生物激光雷達(dá)等。
按用途分:有激光測(cè)距儀、靶場(chǎng)激光雷達(dá)、火控激光雷達(dá)、跟蹤識(shí)別激光雷達(dá)、多功能戰(zhàn)術(shù)激光雷達(dá)、偵毒激光雷達(dá)、導(dǎo)航激光雷達(dá)、氣象激光雷達(dá)、偵毒和大氣監(jiān)測(cè)激光雷達(dá)等。
在具體應(yīng)用時(shí),激光雷達(dá)既可單獨(dú)使用,也能夠同微波雷達(dá),可見(jiàn)光電視、紅外電視或微光電視等成像設(shè)備組合使用,使得系統(tǒng)既能搜索到遠(yuǎn)距離目標(biāo),又能實(shí)現(xiàn)對(duì)目標(biāo)的精密跟蹤。
激光雷達(dá)與微波雷達(dá)比較
激光雷達(dá)的波長(zhǎng)比微波短好幾個(gè)數(shù)量級(jí),又有更窄的波束。因此,于微波雷達(dá)相比,激光雷達(dá)具有如下優(yōu)點(diǎn):
1、角分辨率高,速度分辨率高和距離分辨率高。采用距離-多普勒成像技術(shù)可以得到運(yùn)動(dòng)目標(biāo)的高分辨率的清晰圖象。
2、抗干擾能力強(qiáng),隱蔽性好;激光不受無(wú)線(xiàn)電波干擾,能穿越等離子鞘,低仰角工作時(shí),對(duì)地面多路徑效率不敏感。激光束很窄,只有在被照射的那一點(diǎn),那瞬間,才能被接收,所以激光雷達(dá)發(fā)射的激光被截獲的概率很低。
3、激光雷達(dá)的波長(zhǎng)短,可以在分子量級(jí)上對(duì)目標(biāo)探測(cè)。這是微波雷達(dá)無(wú)能為力的。
4、在功能相同的情況下,比微波雷達(dá)體積小,重量輕。

當(dāng)然,激光雷達(dá)也有如下缺點(diǎn):
1、激光受大氣及氣象影響大。大氣衰減和惡劣天氣使作用距離降低。此外,大氣湍流會(huì)降低激光雷達(dá)的測(cè)量精度。
2、激光束窄,難以搜索目標(biāo)和捕獲目標(biāo)。一般先有其他設(shè)備實(shí)施大空域、快速粗捕目標(biāo),然后交由激光雷達(dá)對(duì)目標(biāo)進(jìn)行精密跟蹤測(cè)量。
激光雷達(dá)探測(cè)原理
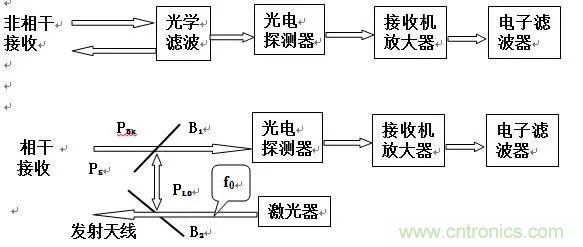
激光雷達(dá)最重要的性能參數(shù)是系統(tǒng)信噪比(SNR)。下圖給出了激光雷達(dá)的非相干和相干接收機(jī)方框圖。
背景噪聲
非相干接收機(jī)除了信號(hào)光功率Ps以外,還有附加項(xiàng),即背景光功率PBK。。它是由太陽(yáng)光和物體的自身輻射,物體對(duì)輻射的反射、漫反射和閃爍等引起的不必要的噪聲信號(hào)在接收機(jī)非線(xiàn)性光探測(cè)器中變?yōu)殡娦盘?hào)和被放大,經(jīng)過(guò)匹配濾波器和其他抑制噪聲的措施后,產(chǎn)生一個(gè)視頻帶寬的有效信號(hào)。
相干接收機(jī)中,除了激光器所發(fā)出的頻率為f0的信號(hào)光外還有經(jīng)過(guò)光束分束器的本振光。信號(hào)光的回波和本振光一同耦合到光探測(cè)。除了接收到光信號(hào)光功率PS,外本地震蕩光功率PLo,它們一同與背景噪聲項(xiàng)PBK相競(jìng)爭(zhēng),結(jié)果就壓抑了噪聲。
背景噪聲有:
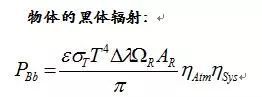
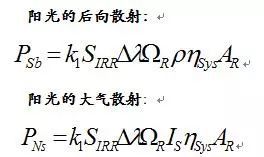
上式中,ε是目標(biāo)的輻射系數(shù);ρ是目標(biāo)的反射系數(shù);T是目標(biāo)的溫度(K);Δλ是光波長(zhǎng)范圍(μm);AR是接收機(jī)探測(cè)器敏感面面積(m²);k1是太陽(yáng)光通過(guò)大氣的透過(guò)系數(shù);SIRR是太陽(yáng)的輻射度();IS是大氣的散射系數(shù);ηSys是系統(tǒng)的光學(xué)效率;ΩR是輻射體輻射的能量的立體角;σT是斯特藩-玻耳茲曼常數(shù)。
信噪比的表達(dá)
式中, 是信號(hào)電流的均方值; 是散彈噪聲電流的均方值; 是熱噪聲電流的均方值; 是背景噪聲電流的均方值; 是暗電流的均方值;是本振電流的均方值。
將以上電流代入信噪比SNR方程可以得到非相干和相干激光雷達(dá)信噪比方程:
非相干激光雷達(dá)的信噪比SNR方程可以表示為:
相干激光雷達(dá)的信噪比SNR方程表示為:
激光雷達(dá)關(guān)鍵技術(shù)分析
空間掃描技術(shù)
激光雷達(dá)的空間掃描方法可分為非掃描體制和掃描體制,其中掃描體制可以選擇機(jī)械掃描、電學(xué)掃描和二元光學(xué)掃描等方式。非掃描成像體制采用多元探測(cè)器,作用距離較遠(yuǎn),探測(cè)體制上同掃描成像的單元探測(cè)有所不同,能夠減小設(shè)備的體積、重量,但在我國(guó)多元傳感器,尤其是面陣探測(cè)器很難獲得,因此國(guó)內(nèi)激光雷達(dá)多采用掃描工作體制。
機(jī)械掃描能夠進(jìn)行大視場(chǎng)掃描,也可以達(dá)到很高的掃描速率,不同的機(jī)械結(jié)構(gòu)能夠獲得不同的掃描圖樣,是目前應(yīng)用較多的一種掃描方式。聲光掃描器采用聲光晶體對(duì)入射光的偏轉(zhuǎn)實(shí)現(xiàn)掃描,掃描速度可以很高,掃描偏轉(zhuǎn)精度能達(dá)到微弧度量級(jí)。但聲光掃描器的掃描角度很小,光束質(zhì)量較差,耗電量大,聲光晶體必須采用冷卻處理,實(shí)際工程應(yīng)用中將增加設(shè)備量。
二元光學(xué)是光學(xué)技術(shù)中的一個(gè)新興的重要分支,它是建立在衍射理論、計(jì)算機(jī)輔助設(shè)計(jì)和細(xì)微加工技術(shù)基礎(chǔ)上的光學(xué)領(lǐng)域的前沿學(xué)科之一。利用二元光學(xué)可制造出微透鏡陣列靈巧掃描器。一般這種掃描器由一對(duì)間距只有幾微米的微透鏡陣列組成,一組為正透鏡,另一組為負(fù)透鏡,準(zhǔn)直光經(jīng)過(guò)正透鏡后開(kāi)始聚焦,然后通過(guò)負(fù)透鏡后變?yōu)闇?zhǔn)直光。當(dāng)正負(fù)透鏡陣列橫向相對(duì)運(yùn)動(dòng)時(shí),準(zhǔn)直光方向就會(huì)發(fā)生偏轉(zhuǎn)。這種透鏡陣列只需要很小的相對(duì)移動(dòng)輸出光束就會(huì)產(chǎn)生很大的偏轉(zhuǎn),透鏡陣列越小,達(dá)到相同的偏轉(zhuǎn)所需的相對(duì)移動(dòng)就越小。因此,這種掃描器的掃描速率能達(dá)到很高。二元光學(xué)掃描器的缺點(diǎn)是掃描角度較小(幾度),透過(guò)率低,目前工程應(yīng)用中還不夠成熟。
激光發(fā)射機(jī)技術(shù)
目前,激光雷達(dá)發(fā)射機(jī)光源的選擇土要有半導(dǎo)體激光器、半導(dǎo)體泵浦的固體激光器和氣體激光器等。
半導(dǎo)體激光器是以直接帶隙半導(dǎo)體材料構(gòu)成的Pn結(jié)或Pin結(jié)為工作物質(zhì)的一種小型化激光器。半導(dǎo)體激光器工作物質(zhì)有幾十種,目前已制成激光器的半導(dǎo)體材料有砷化鎵(GaAs)、砷化銦(InAs)、銻化鋼(InSb)、硫化鎘(Cds)、碲化鎘(cdTe)、硒化鉛(PbSe)、碲化鉛(PbTe)等。半導(dǎo)體激光器的激勵(lì)方式主要有電注入式、光泵式和高能電子束激勵(lì)式。絕大多數(shù)半導(dǎo)體激光器的激勵(lì)方式是電注入,即給Pn結(jié)加正向電壓,以使在結(jié)平面區(qū)域產(chǎn)生受激發(fā)射,也就是說(shuō)是個(gè)正向偏置的二極管,因此半導(dǎo)體激光器又稱(chēng)為半導(dǎo)體激光器_極管。自世界上第一只半導(dǎo)體激光器在1962年問(wèn)世以來(lái),經(jīng)過(guò)幾十年來(lái)的研究,半導(dǎo)體激光器得到了驚人的發(fā)展,它的波長(zhǎng)從紅外到藍(lán)綠光,覆蓋范圍逐漸擴(kuò)大,各項(xiàng)性能參數(shù)不斷提高,輸出功率由幾毫瓦提高到千瓦級(jí)(陣列器件)。在某些重要的應(yīng)用領(lǐng)域,過(guò)去常用的其他激光器已逐漸為半導(dǎo)體激光器所取代。

半導(dǎo)體泵浦固體激光器綜合了半導(dǎo)體激光器與固體激光器的優(yōu)點(diǎn),具有體積小、重量輕、量子效率高的特點(diǎn)。通過(guò)泵浦激光T作物質(zhì),輸出光束質(zhì)量好、時(shí)間相干性和空間相干性好的泵浦光,摒棄了半導(dǎo)體激光器光束質(zhì)量差、模式特性薺的缺點(diǎn),與氙燈泵浦同體激光器相比具有泵浦效率高、T作壽命長(zhǎng)、穩(wěn)定可靠的優(yōu)點(diǎn)。激光工作物質(zhì)可以選擇釹(Nd)、銩(Tm)、鈥(Ho)、鉺(Er)、鐿(Yb)、鋰(Li)、鉻(Cr)等,獲得從1.047~2.8μm的多種波。目前,半導(dǎo)體泵浦固體激光器的許多工程應(yīng)用問(wèn)題已經(jīng)得到解決,是應(yīng)用前景最好、發(fā)展最快的一種激光器。
氣體激光器是目前種類(lèi)較多、輸出激光波長(zhǎng)最豐富、應(yīng)用最廣的一種激光器。其特點(diǎn)是激光輸出波長(zhǎng)范圍較寬;氣體的光學(xué)均勻性較好,因此輸出的光束質(zhì)量好,其單色性、相干性和光束穩(wěn)定性好。
高靈敏度接收機(jī)設(shè)計(jì)技術(shù)
激光雷達(dá)的接收單元由接收光學(xué)系統(tǒng)、光電探測(cè)器和回波檢測(cè)處理電路等組成,其功能是完成信號(hào)能量匯聚、濾波、光電轉(zhuǎn)變、放大和檢測(cè)等功能。對(duì)激光雷達(dá)接收單元設(shè)計(jì)的基本要求是:高接收靈敏度、高回波探測(cè)概率和低的虛警率。在工程應(yīng)用中,為提高激光測(cè)距機(jī)的性能而采用提高接收機(jī)靈敏度的技術(shù)途徑,要比采用提高發(fā)射機(jī)輸出功率的技術(shù)途徑更為合理、有效。提高激光回波接收靈敏度的方法主要是接收機(jī)選用適當(dāng)?shù)奶綔y(cè)方式和光電探測(cè)器。
探測(cè)器足激光接收機(jī)的核心部件,也是決定接收機(jī)性能的關(guān)鍵因素,因此,探測(cè)器的選擇和合理使用是激光接收機(jī)設(shè)計(jì)中的重要環(huán)節(jié)。目前,用于激光探測(cè)的探測(cè)器可分為基于外光電效應(yīng)的光電倍增管和基于內(nèi)光電效應(yīng)的光電二極管及雪崩光電二極管等,由于雪崩光電二極管具有高的內(nèi)部增益、體積小、可靠性好等優(yōu)點(diǎn),往往是工程應(yīng)用中的首選探測(cè)器件。
激光雷達(dá)的回波信號(hào)電路主要包括放大電路和閾值檢測(cè)電路。放大電路的設(shè)計(jì)要與回波信號(hào)的波形相匹配,對(duì)于不同的回波信號(hào)(如脈沖信號(hào)、連續(xù)波信號(hào)、準(zhǔn)連續(xù)信號(hào)或調(diào)頻信號(hào)等),接收機(jī)要有與之相匹配的帶寬和增益。如對(duì)于脈沖工作體制的激光雷達(dá),放大電路要有較寬的帶寬,同時(shí)還要采用時(shí)問(wèn)增益控制技術(shù),其放大器增益不是固定的,而是按激光雷達(dá)方程變化曲線(xiàn)設(shè)計(jì)的控制曲線(xiàn),以抑制近距離后向散射,降低虛警,并使放大器豐要工作于線(xiàn)性放大區(qū)域。
閾值檢測(cè)電路是一個(gè)脈沖峰值比較器,確定回波到達(dá)的判據(jù)是回波脈沖幅值超過(guò)閾值。這種方法的優(yōu)點(diǎn)是簡(jiǎn)單,但存在兩個(gè)主要缺點(diǎn)。首先,只要有一個(gè)脈沖幅值首先超越閡值,檢測(cè)電路就會(huì)將其確定為回波,而不管它是同波脈沖還是雜波干擾脈沖,從而導(dǎo)致虛警;其次是回波脈沖幅度的變化會(huì)引起到達(dá)時(shí)間的誤差,從而導(dǎo)致測(cè)距誤差。在高精度激光測(cè)距機(jī)中,通常采用峰值采樣保持電路和恒比定時(shí)電路來(lái)減小測(cè)時(shí)誤差。
終端信息處理技術(shù)
激光雷達(dá)終端信息處理系統(tǒng)的任務(wù)是既要完成對(duì)各傳動(dòng)機(jī)構(gòu)、激光器、掃描機(jī)構(gòu)及各信號(hào)處理電路的同步協(xié)調(diào)與控制,又要對(duì)接收機(jī)送出的信號(hào)進(jìn)行處理,獲取目標(biāo)的距離信息,對(duì)于成像激光雷達(dá)來(lái)說(shuō)還要完成系統(tǒng)三維圖像數(shù)據(jù)的錄取、產(chǎn)生、處理、重構(gòu)等任務(wù)。
目前激光雷達(dá)的終端信息處理系統(tǒng)設(shè)計(jì)采用主要采用大規(guī)模集成電路和計(jì)算機(jī)完成。其中測(cè)距單元可利用FPGA技術(shù)實(shí)現(xiàn),在高精度激光雷達(dá)中還需采用精密測(cè)時(shí)技術(shù)。對(duì)于成像激光雷達(dá)來(lái)說(shuō),系統(tǒng)還需要解決圖像行的非線(xiàn)性?huà)呙栊拚?、幅度/距離圖像顯示等技術(shù)?;夭ㄐ盘?hào)的幅度量化采用模擬延時(shí)線(xiàn)和高速運(yùn)算放大器組成峰值保持器,采用高速A/D完成幅度量化。圖像數(shù)據(jù)采集由高速DSP完成,圖像處理及三維顯示可由工業(yè)控制計(jì)算機(jī)完成。
激光雷達(dá)的應(yīng)用
激光雷達(dá)技術(shù)在城市三維建筑模型中的應(yīng)用
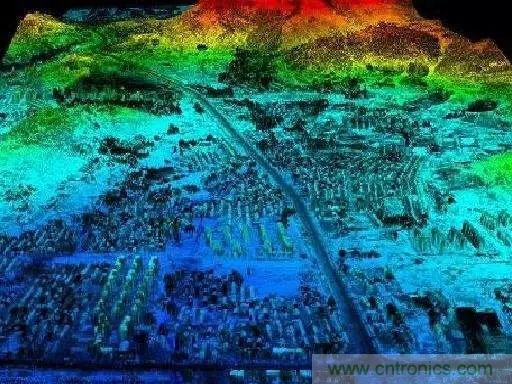
“數(shù)字城市”是數(shù)字地球技術(shù)系統(tǒng)的重要組成部分,而表達(dá)城市主要物體的三維模型包括三維地形,三維建筑模型、三維管線(xiàn)模型。這些三維建筑模型是數(shù)字城市重要的基礎(chǔ)信息之一。
而激光雷達(dá)技術(shù)可以快速完成三維空間數(shù)據(jù)采集,它的優(yōu)點(diǎn)使它有很廣闊的應(yīng)用前景。機(jī)載雷達(dá)系統(tǒng)的組成包括:激光掃描器、高精度慣性導(dǎo)航儀、應(yīng)用查分技術(shù)的全球定位系統(tǒng)、高分辨率數(shù)碼相機(jī)。通過(guò)這四種技術(shù)的集成可以快速的完成地面三維空間地理信息的采集,經(jīng)過(guò)處理便可得到具有坐標(biāo)信息的影像數(shù)據(jù)。利用激光進(jìn)行三維建筑建模的技術(shù)。首先,進(jìn)行數(shù)據(jù)預(yù)處理。就是結(jié)合IMUU記錄的姿勢(shì)參數(shù)、機(jī)載GPS數(shù)據(jù)、地面基站GPS觀(guān)察數(shù)據(jù)、GPS偏心分量、掃描儀和數(shù)碼相機(jī)各自的偏心分量,進(jìn)行GPS/IMU聯(lián)合解算,得到掃描儀及相機(jī)曝光坐標(biāo)下的軌跡文件,進(jìn)而得到外方為元素。其次,使用LIDAR數(shù)據(jù)商業(yè)處理軟件將地面數(shù)據(jù)與非地面數(shù)據(jù)分離,生成DEM,在利用純地表數(shù)據(jù)對(duì)影像外方位元素通過(guò)尋找同名像點(diǎn)的方式進(jìn)行校正快速生成DOM。DEM和DOM疊加在一起就形成了三維地形模型。最后,為了表達(dá)真實(shí)的城市面貌對(duì)三維建筑模型進(jìn)行紋理貼圖。紋理粘貼的方法常見(jiàn)的有手動(dòng)粘貼和紋理映射兩種。常用的紋理獲取方法也有兩種,第一種方法是對(duì)建筑頂部紋理采用航空影像,側(cè)面紋理信息為手持相機(jī)實(shí)地拍攝。第二種方法為傾斜航空攝影。得到紋理后利用專(zhuān)業(yè)軟件進(jìn)行紋理面的選擇、勻光處理等將反應(yīng)建筑現(xiàn)狀的影像信息映射在對(duì)應(yīng)的模型上就達(dá)到了反映城市現(xiàn)狀的目的。
激光雷達(dá)技術(shù)在大氣環(huán)境監(jiān)測(cè)中的應(yīng)用
激光雷達(dá)由于探測(cè)波長(zhǎng)短、波束定向性強(qiáng),能量密度高,因此具有高空間分辨率、高的探測(cè)靈敏度、能分辨被探測(cè)物種和不存在探測(cè)盲區(qū)等優(yōu)點(diǎn),已經(jīng)成為目前對(duì)大氣進(jìn)行高精度遙感探測(cè)的有效手段。利用激光雷達(dá)可以探測(cè)氣溶膠、云粒子的分布、大氣成分和風(fēng)場(chǎng)的垂直廓線(xiàn),對(duì)主要污染源可以進(jìn)行有效監(jiān)控。
對(duì)大氣污染物分布的觀(guān)測(cè)。當(dāng)激光雷達(dá)發(fā)出的激光與這些漂浮粒子發(fā)生作用時(shí)會(huì)發(fā)生散射,而且入射光波長(zhǎng)與漂浮粒子的尺度為同一數(shù)量級(jí),散射系數(shù)與波長(zhǎng)的一次方成反比,米氏散射激光雷達(dá)依據(jù)這一性質(zhì)可完成氣溶膠濃度、空間分布及能見(jiàn)度的測(cè)定。
差分激光雷達(dá)主要用于大氣成分的測(cè)定。差分激光雷達(dá)的測(cè)試原理是使用激光雷達(dá)發(fā)出兩種不等的光,其中一個(gè)波長(zhǎng)調(diào)到待測(cè)物體的吸收線(xiàn),而另一波長(zhǎng)調(diào)到線(xiàn)上吸收系數(shù)較小的邊翼,然后以高重復(fù)頻率將這兩種波長(zhǎng)的光交替發(fā)射到大氣中,此時(shí)激光雷達(dá)所測(cè)到的這兩種波長(zhǎng)光信號(hào)衰減差是待測(cè)對(duì)象的吸收所致,通過(guò)分析便可得到待測(cè)對(duì)象的濃度分布。
在大氣中間層金屬蒸氣層的觀(guān)測(cè)主要采用熒光共振散射激光雷達(dá)。其原理是利用Na、K、Li、Ca等金屬原子作為示蹤物開(kāi)展大氣動(dòng)力學(xué)研究。由于中間層頂大氣分子密度較低,瑞利散射信號(hào)十分微弱,而該區(qū)域內(nèi)的鈉金屬原子層由于其共振熒光截面比瑞利散射截面高幾個(gè)數(shù)量級(jí),因此,利用鈉熒光雷達(dá)研究鈉層分布,進(jìn)而研究重力波等有關(guān)性質(zhì)更展示其獨(dú)有的特性。
激光雷達(dá)在油氣直接勘察中的應(yīng)用
利用遙感直接探測(cè)油氣上方的烴類(lèi)氣體的異常是一種直接而快捷的油氣勘探方法。激光雷達(dá)是激光技術(shù)和雷達(dá)技術(shù)相結(jié)合的產(chǎn)物,將其應(yīng)用于油類(lèi)勘測(cè)已經(jīng)成為可能。激光器的工作波長(zhǎng)范圍廣,單色性好,而且激光是定向輻射,具有準(zhǔn)直性,測(cè)量靈敏度高等優(yōu)點(diǎn),使其在遙感方面遠(yuǎn)優(yōu)于其他傳感器。

激光雷達(dá)由發(fā)射系統(tǒng)和接收系統(tǒng)兩大部分組成。發(fā)射系統(tǒng)主要包括激光器和發(fā)射望遠(yuǎn)鏡;接受系統(tǒng)主要由接收望遠(yuǎn)鏡、光電倍增管和顯示器三部分組成。激光雷達(dá)技術(shù)是根據(jù)激光光束在大氣中傳輸時(shí),大氣中塵埃微粒和各種氣體分子對(duì)激光產(chǎn)生彌散射,瑞利散射、拉曼散射和共振熒光以及共振吸收等現(xiàn)象,然后利用激光雷達(dá)接收系統(tǒng)收集和記錄上述現(xiàn)象過(guò)程中所產(chǎn)生的背向散射光譜,以達(dá)到探測(cè)大氣成份和濃度的目的。
烴類(lèi)氣體是油氣田油氣微滲漏的主要指示性氣體,而近地表的烴類(lèi)氣體從成分上看,主要是由早期的成巖作用、細(xì)菌作用和地下熱作用等共同作用的結(jié)果。共振吸收激光雷達(dá)在探測(cè)氣體分子含量時(shí)一般都采用各種可調(diào)諧激光器激光雷達(dá)探測(cè)氣體的探測(cè)靈敏度,是指激光雷達(dá)所能接收到的激光功率細(xì)微變化的能力。探測(cè)的距離和被測(cè)氣體分子的吸收截面是影響探鍘?kù)`敏度的主要因素。據(jù)研究資料介紹,吸收截面越大靈敏度越高;而探測(cè)距離越大,靈敏度越高。而路徑與靈敏度之間的關(guān)系是路徑越長(zhǎng),氣體分子對(duì)激光光束的吸收衰減也越強(qiáng)烈,從而使探測(cè)靈敏度大大提高。但是,由于存在著激光光斑的發(fā)散和因大氣湍流引起的激光傳輸方向改變的抖動(dòng)效應(yīng),將使激光的有效利用率減小,即信噪比下降,從而影響污染氣體分子含量的探測(cè)精度。因此探測(cè)距離以數(shù)公里為宜。
利用激光雷達(dá)進(jìn)行氣象研究
激光雷達(dá)是一種非常重要的氣象儀器,它是基于電磁能量會(huì)從目標(biāo)反射回來(lái)的檢測(cè)原理。像雷達(dá)一樣,有關(guān)目標(biāo)的性質(zhì)、距離、角度等數(shù)據(jù)都可以通過(guò)光的散射給我們提供出來(lái)。其比雷達(dá)更為優(yōu)秀的是它不僅可以在微波區(qū)域進(jìn)行操作,而且可以在可見(jiàn)光、紅外光或更短的區(qū)域進(jìn)行操作。激光雷達(dá)是雷達(dá)在光學(xué)電磁頻譜上的一個(gè)延拓。由激光發(fā)射機(jī)生成一個(gè)短脈沖的能量再針對(duì)一個(gè)目標(biāo)發(fā)射出去。目標(biāo)輻射出的散射波由接收光學(xué)系統(tǒng)收集并且集中到一個(gè)敏感的探測(cè)器上,它將入射光的能量轉(zhuǎn)換成一個(gè)電信號(hào),經(jīng)過(guò)放大信號(hào)處理后再進(jìn)行使用。
在斯坦福研究所開(kāi)發(fā)的第一個(gè)比較原始的儀器設(shè)計(jì)清楚地表明了激光雷達(dá)的應(yīng)用,如通過(guò)雨水或底層的云的結(jié)構(gòu)探測(cè)云和霧層的位置,上升限度的高度。激光雷達(dá)回波可以清楚的從低海拔地區(qū)觀(guān)察到一個(gè)清晰的連續(xù)氣溶膠層,而這對(duì)于肉眼來(lái)說(shuō)是不可見(jiàn)。
SRI Mark III的激光雷達(dá),對(duì)稀薄的卷云的檢測(cè)展示了一個(gè)更高的水平。它表明一個(gè)很高的峰值功率可以穿透云層,同時(shí)形成反射。利用這種現(xiàn)象在不同海波高度觀(guān)察時(shí)就可以證明幾個(gè)不同層的卷云的存在。雖然用激光雷達(dá)性能優(yōu)越,除了優(yōu)化設(shè)計(jì)系統(tǒng)中的參數(shù)之外,許多技術(shù)被利用來(lái)改善的激光雷達(dá)系統(tǒng)的性能。例如激光器的冷卻就是所有激光器必須解決的問(wèn)題。激光雷達(dá)脈沖重復(fù)頻率較低或泵浦閾值較低時(shí)可以采用空氣制冷,而以更大的激光脈沖能量時(shí)必須采用制冷系統(tǒng)來(lái)冷卻激光器。
激光雷達(dá)應(yīng)用在汽車(chē)及交通運(yùn)輸領(lǐng)域的相關(guān)技術(shù)
自動(dòng)泊車(chē)技術(shù)
自動(dòng)泊車(chē)系統(tǒng)一般在汽車(chē)前后四周安裝感應(yīng)器,這些感應(yīng)器既可以充當(dāng)發(fā)送器,也可以充當(dāng)接收器。它們會(huì)發(fā)送激光信號(hào),當(dāng)信號(hào)碰到車(chē)身周邊的障礙物時(shí)會(huì)反射回來(lái)。然后,車(chē)載計(jì)算機(jī)會(huì)利用其接收信號(hào)所需時(shí)間確定障礙物的位置。也有部分自動(dòng)泊車(chē)系統(tǒng)采用保險(xiǎn)杠上安裝攝像頭或者雷達(dá)來(lái)檢測(cè)障礙物??偟膩?lái)說(shuō)其原理是一樣的,汽車(chē)會(huì)檢測(cè)到已停好的車(chē)輛、停車(chē)位的大小以及與路邊的距離,然后將車(chē)子駛?cè)胪\?chē)位。
其工作模式為如下,當(dāng)汽車(chē)移動(dòng)到前車(chē)旁邊時(shí),系統(tǒng)會(huì)給駕駛員一個(gè)信號(hào),告訴他應(yīng)該停車(chē)的時(shí)間。然后,駕駛員換倒擋,稍稍松開(kāi)剎車(chē),開(kāi)始倒車(chē)。然后,車(chē)上的計(jì)算機(jī)系統(tǒng)將接管方向盤(pán)。計(jì)算機(jī)通過(guò)動(dòng)力轉(zhuǎn)向系統(tǒng)轉(zhuǎn)動(dòng)車(chē)輪,將汽車(chē)完全倒入停車(chē)位。當(dāng)汽車(chē)向后倒得足夠遠(yuǎn)時(shí),系統(tǒng)會(huì)給駕駛員另一個(gè)信號(hào),告訴他應(yīng)該停車(chē)并換為前進(jìn)擋。汽車(chē)向前移動(dòng),將車(chē)輪調(diào)整到位。最后,系統(tǒng)再給駕駛員一個(gè)信號(hào),告訴他車(chē)子已停好。
ACC主動(dòng)巡航技術(shù)
ACC系統(tǒng)包括雷達(dá)傳感器、數(shù)字信號(hào)處理器和控制模塊。司機(jī)設(shè)定預(yù)期車(chē)速,系統(tǒng)利用低功率雷達(dá)或紅外線(xiàn)光束得到前車(chē)的確切位置,如果發(fā)現(xiàn)前車(chē)減速或監(jiān)測(cè)到新目標(biāo),系統(tǒng)就會(huì)發(fā)送執(zhí)行信號(hào)給發(fā)動(dòng)機(jī)或制動(dòng)系統(tǒng)來(lái)降低車(chē)速,使車(chē)輛和前車(chē)保持一個(gè)安全的行駛距離。當(dāng)前方道路沒(méi)車(chē)時(shí)又會(huì)加速恢復(fù)到設(shè)定的車(chē)速,雷達(dá)系統(tǒng)會(huì)自動(dòng)監(jiān)測(cè)下一個(gè)目標(biāo)。主動(dòng)巡航控制系統(tǒng)代替司機(jī)控制車(chē)速,避免了頻繁地取消和設(shè)定巡航控制,使巡航系統(tǒng)適合于更多的路況,為駕駛者提供了一種更輕松的駕駛方式。
當(dāng)前應(yīng)用到ACC系統(tǒng)上的雷達(dá)主要有單脈沖雷達(dá)、毫米波雷達(dá)、激光雷達(dá)以及紅外探測(cè)雷達(dá)等。單脈沖雷達(dá)和毫米波雷達(dá)是全天候雷達(dá),可以適用各種天氣情況,具有探測(cè)距離遠(yuǎn)、探測(cè)角度范圍大、跟蹤目標(biāo)多等優(yōu)點(diǎn)。激光雷達(dá)對(duì)工作環(huán)境的要求較高,對(duì)天氣變化比較敏感,在雨雪天、風(fēng)沙天等惡劣天氣探測(cè)效果不理想,探測(cè)范圍有限,跟蹤目標(biāo)較少,但其最大的優(yōu)點(diǎn)在于探測(cè)精度比較高且價(jià)格低。紅外線(xiàn)探測(cè)在惡劣天氣條件下性能不穩(wěn)定,探測(cè)距離較短,但價(jià)格便宜。
自動(dòng)剎車(chē)技術(shù)
高致死率的汽車(chē)交通事故推動(dòng)了自動(dòng)緊急制動(dòng)系統(tǒng)的發(fā)展。自動(dòng)緊急制動(dòng)系統(tǒng)的監(jiān)測(cè)系統(tǒng)由一個(gè)嵌入格柵的雷達(dá)、一個(gè)安裝于車(chē)內(nèi)后視鏡前端的攝像頭及一個(gè)中央控制器組成。雷達(dá)監(jiān)測(cè)汽車(chē)前方的物體和距離,而攝像頭探測(cè)物體類(lèi)型型。高清攝像頭監(jiān)測(cè)行人和自行車(chē)運(yùn)動(dòng)軌跡。中央控制控制器監(jiān)測(cè)全局信息并分析交通狀況。當(dāng)出現(xiàn)狀況時(shí)發(fā)出警示信號(hào)提醒司機(jī),若司機(jī)未能及時(shí)做出反應(yīng),系統(tǒng)也將強(qiáng)制控制車(chē)輛制動(dòng)。
無(wú)人自駕技術(shù)
福特公司推出的無(wú)人自駕汽車(chē)中使用。其名為“激光雷達(dá)系統(tǒng)”,本系統(tǒng)在車(chē)頂安裝四個(gè)可旋轉(zhuǎn)激光雷達(dá)傳感器,持續(xù)向四周發(fā)射微弱激光束,從而實(shí)時(shí)勾勒出汽車(chē)周?chē)?60度3D街景,同時(shí)結(jié)合360攝像頭以幫助汽車(chē)觀(guān)察周?chē)h(huán)境,系統(tǒng)將收集到的信息進(jìn)行分析,區(qū)分恒定不變的固體(車(chē)道分隔,出口坡道,公園長(zhǎng)椅等)以及不斷移動(dòng)的物體(受驚的小鹿,行人,迎面而來(lái)的車(chē)輛等),并將所有的數(shù)據(jù)都匯總在一起,再根據(jù)密歇根大學(xué)開(kāi)發(fā)的算法判斷周?chē)h(huán)境,從而做出相應(yīng)的反應(yīng)。

汽車(chē)快速成型技術(shù)
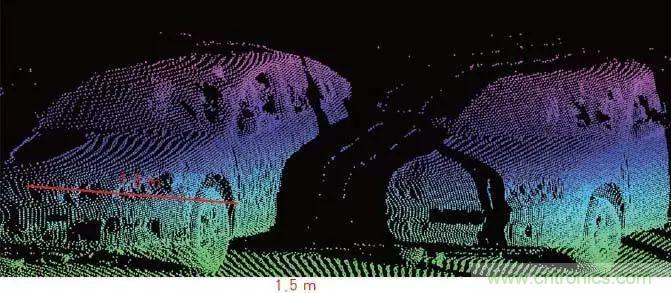
于1990年激光雷達(dá)的快速成型技術(shù)是在計(jì)算機(jī)技術(shù)、高分子材料技術(shù)、激光技術(shù)、CAD/CAM技術(shù)、精密機(jī)械技術(shù)等發(fā)展下產(chǎn)生的,激光雷達(dá)掃描系統(tǒng)的快速成型技術(shù)主要應(yīng)用于樣件汽車(chē)模型的制作和模具的幵發(fā),這項(xiàng)技術(shù)能夠較大的縮短新產(chǎn)品的幵發(fā)周期,降低了開(kāi)發(fā)的成本,并且能夠使新產(chǎn)品的市場(chǎng)競(jìng)爭(zhēng)力得到了提高。還能夠應(yīng)用在汽車(chē)的零部件上,多用于分析和檢驗(yàn)加工的工藝性能、裝配性能、相關(guān)的工裝模具以及測(cè)試運(yùn)動(dòng)特性、風(fēng)洞實(shí)驗(yàn)和表達(dá)有限元分析結(jié)果的實(shí)體等。利用激光雷達(dá)的非接觸式測(cè)量、高精度、檢測(cè)速度快等特點(diǎn),在汽車(chē)車(chē)身的三維檢測(cè)和幵發(fā)設(shè)計(jì)過(guò)程中,激光雷達(dá)得到了廣泛的應(yīng)用。利用激光雷達(dá)測(cè)量得到車(chē)身的點(diǎn)云數(shù)據(jù),對(duì)車(chē)身進(jìn)行逆向設(shè)計(jì),將點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理,然后進(jìn)行曲線(xiàn)、曲面、實(shí)體模型的重構(gòu),最終實(shí)現(xiàn)車(chē)身模型重現(xiàn)的目的。
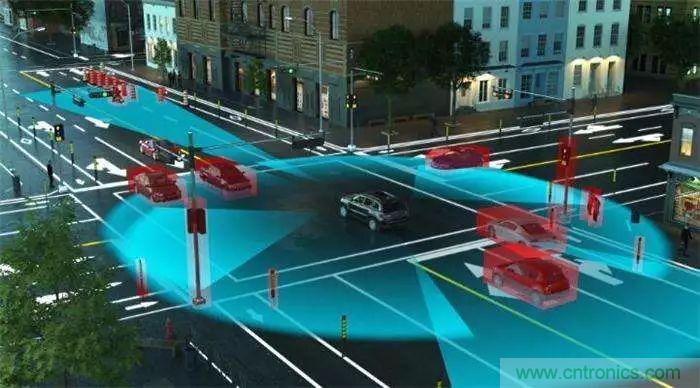
激光雷達(dá)與智能交通信號(hào)控制
在城市重要交通路口信號(hào)控制系統(tǒng)中集成一個(gè)地面三維激光掃描系統(tǒng),通過(guò)激光掃描儀對(duì)一定距離的道路進(jìn)行連續(xù)掃描,獲得這段道路上實(shí)時(shí)、動(dòng)態(tài)的車(chē)流量點(diǎn)云數(shù)據(jù),通過(guò)數(shù)據(jù)處理獲得車(chē)流量等參數(shù),根據(jù)對(duì)東西向和南北向車(chē)流量大小的比較以及短暫車(chē)流量預(yù)測(cè),從而自動(dòng)調(diào)節(jié)東西向和南北向信號(hào)燈周期。
激光雷達(dá)與交通事故勘查
運(yùn)用三維激光掃描儀對(duì)事故現(xiàn)場(chǎng)進(jìn)行三維掃描,現(xiàn)場(chǎng)取證,掃描儀的數(shù)據(jù)能夠生成事故現(xiàn)場(chǎng)的高質(zhì)量圖像和細(xì)節(jié)示意圖,便于后期提取調(diào)查和法庭審理。
調(diào)查表明,用三維激光掃描儀采集事故現(xiàn)場(chǎng)數(shù)據(jù)平均每次減少90分鐘的道路封閉時(shí)間。
本文轉(zhuǎn)載自傳感器技術(shù)。
推薦閱讀:



