

【導(dǎo)讀】本文第一部分詳細(xì)描述該基帶處理器的一般設(shè)計(jì)原則。該部分主要是BBP的理論介紹。在第二部分,使用ADI公司的AD9361FPGA參考設(shè)計(jì)討論BBP的實(shí)際硬件實(shí)施。值得注意的是,主要設(shè)計(jì)目標(biāo)是使設(shè)計(jì)盡可能簡(jiǎn)單,并在實(shí)驗(yàn)室環(huán)境中演示快速無線數(shù)據(jù)傳輸。在使用和干擾RF頻譜時(shí),須考慮到法規(guī)及其他影響。
如今,無線系統(tǒng)無處不在,無線設(shè)備和服務(wù)的數(shù)量持續(xù)增長。設(shè)計(jì)完整的RF系統(tǒng)是一項(xiàng)跨學(xué)科設(shè)計(jì)挑戰(zhàn),模擬RF前端是其中最關(guān)鍵的部分。然而, AD9361 等集成RF收發(fā)器的推出顯著減少了此類設(shè)計(jì)的RF挑戰(zhàn)。這些收發(fā)器可為模擬RF信號(hào)鏈提供數(shù)字接口,允許輕松集成到ASIC或FPGA,進(jìn)行基帶處理。基帶處理器(BBP)允許在終端應(yīng)用和收發(fā)器設(shè)備之間的數(shù)字域中處理用戶數(shù)據(jù)。此外,使用Simulink等系統(tǒng)建模工具可以輕松完成基帶處理器設(shè)計(jì)。然而,新手用戶可能會(huì)發(fā)現(xiàn)難以理解和解決這個(gè)通信系統(tǒng)難題。本文嘗試為無線傳輸通信系統(tǒng)設(shè)計(jì)和實(shí)施簡(jiǎn)單的RF基帶處理器。設(shè)計(jì)使用AD9361 FPGA參考設(shè)計(jì)框架,在AD-FMCOMMS2-EBZ和Xilinx® ZC706平臺(tái)上實(shí)施。
基本設(shè)計(jì)
典型的RF系統(tǒng)如圖1所示,直接RF系統(tǒng)除外。該圖1僅顯示了單個(gè)數(shù)據(jù)路徑,反方向是該數(shù)據(jù)路徑的鏡像圖像。本文中提出的相關(guān)基帶處理器允許對(duì)數(shù)據(jù)進(jìn)行處理,以使其在兩個(gè)RF系統(tǒng)之間進(jìn)行無線傳輸。下文討論了基本設(shè)計(jì)要求。
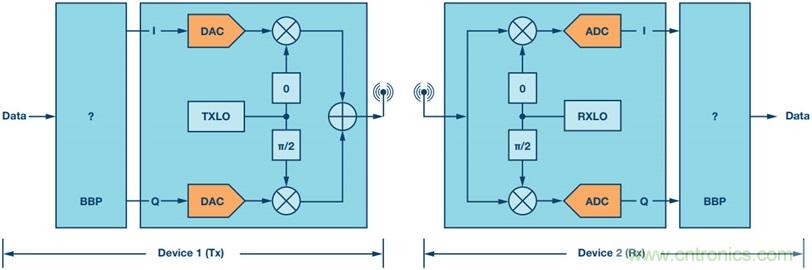
圖1. RF系統(tǒng)框圖
在兩個(gè)正交信號(hào)I & Q上重復(fù)數(shù)據(jù)
注意,載波相互獨(dú)立且彼此不同步。因此,發(fā)射和接收載波之間存在相位和頻率偏移。這將對(duì)接收器的解調(diào)產(chǎn)生不利影響。一個(gè)重要問題是信號(hào)反轉(zhuǎn),正交信號(hào)可能會(huì)反轉(zhuǎn)其作用,因?yàn)槠茣?huì)定期合并和漂離??朔@種不確定性的簡(jiǎn)單方法是在兩個(gè)正交信號(hào)上重復(fù)相同數(shù)據(jù)。
以串行形式發(fā)送和接收數(shù)據(jù)(按位)
大多數(shù)情況下,與BBP連接的RF前端接口是DAC和ADC。這些是模擬信號(hào)的數(shù)字接口。因此,不能簡(jiǎn)單地將數(shù)據(jù)發(fā)送到DAC輸入,并預(yù)計(jì)在ADC輸出端獲得相同數(shù)據(jù)。數(shù)據(jù)以串行形式發(fā)射,將單個(gè)位數(shù)據(jù)映射到DAC的全部分辨率。同樣,數(shù)據(jù)以串行形式接收,從ADC的全部分辨率解映射。這提供了充足的冗余。如果這些是16位轉(zhuǎn)換器,則接收器將從可能的65536數(shù)據(jù)集中決定1或0。僅這一點(diǎn),便可以顯著簡(jiǎn)化解碼。
I & Q信號(hào)相互正交
RF前端設(shè)備(如AD9361)是I/Q收發(fā)器。如果輸入是正交信號(hào),這些設(shè)備最有效。這些設(shè)備通常沿兩個(gè)數(shù)據(jù)路徑進(jìn)行內(nèi)部I/Q匹配和校正,以抵消二者之間的任何差異。規(guī)則是,實(shí)部(I)信號(hào)是余弦函數(shù),虛部(Q)信號(hào)是正弦函數(shù)。
調(diào)制方案是BPSK
可以部署信號(hào)幅度、頻率或相位調(diào)制的所有常見方法。檢測(cè)相位差異相對(duì)來說更加簡(jiǎn)單。由于數(shù)據(jù)以串行形式傳輸,因此必然會(huì)選擇二進(jìn)制相移鍵控(BPSK)。
位間隔是8個(gè)樣本
數(shù)據(jù)需要時(shí)序信息,位間隔??赡艿淖畲笪婚g隔是采樣周期。為了使接收器保持簡(jiǎn)單,需要足夠的時(shí)間來解碼信號(hào)并做出決定。最簡(jiǎn)單的時(shí)序恢復(fù)方法是零交越和峰值檢測(cè)。在這種情況下,峰值將不一致。因此,選擇零交越進(jìn)行位間隔檢測(cè)和跟蹤。兩種系統(tǒng)之間也存在載波差異。在某些情況下,在用戶數(shù)據(jù)的任意端,樣本可能模糊不清。為每半個(gè)正弦信號(hào)留出4個(gè)樣本,位間隔設(shè)置為8個(gè)樣本。因此,有效的傳輸速率是采樣頻率除以8。
數(shù)據(jù)沒有直流成分
時(shí)序和相對(duì)相位恢復(fù)以信號(hào)的零交越為基礎(chǔ)。因此,單個(gè)信號(hào)需要不含任何直流成分。此外,要求信號(hào)每隔一個(gè)位間隔允許至少一個(gè)零交越。正弦信號(hào)兼具兩者的屬性,并且非常符合上述BPSK調(diào)制方案要求。
數(shù)據(jù)已加擾
用戶數(shù)據(jù)是任意的很可能是一長串1或0。數(shù)據(jù)需要加擾,以便在接收器端恢復(fù)時(shí)序和相位,從而更高效地跟蹤信號(hào)。
數(shù)據(jù)以數(shù)據(jù)包的形式傳輸
由于系統(tǒng)彼此不同步,因此接收器的信號(hào)會(huì)存在幅度、頻率和相位誤差。解調(diào)信號(hào)是發(fā)射信號(hào)相對(duì)于本地載波發(fā)生相位變化的信號(hào)。載波可能會(huì)跟蹤一段時(shí)間,選取數(shù)據(jù),然后再跟蹤。因此,設(shè)計(jì)需要做好部分?jǐn)?shù)據(jù)丟失的準(zhǔn)備。為此,數(shù)據(jù)以數(shù)據(jù)包的形式傳輸。可重復(fù)傳輸多個(gè)數(shù)據(jù)包,而非整個(gè)數(shù)據(jù)。
使用CRC驗(yàn)證數(shù)據(jù)包
數(shù)據(jù)包攜帶循環(huán)冗余校驗(yàn)(CRC)碼,因此如果存在不匹配,則允許接收器丟包,并請(qǐng)求再次發(fā)送。
在每個(gè)前同步碼期間完成時(shí)序和相位校正
數(shù)據(jù)包表頭攜帶前同步碼,用于將其從接收到的數(shù)據(jù)流中劃分出來。此外,接收器使用該前同步碼復(fù)位信號(hào)的時(shí)序和相位信息,以解調(diào)數(shù)據(jù)包數(shù)據(jù)。
內(nèi)置性能指標(biāo)
接收器也支持統(tǒng)計(jì)計(jì)數(shù)器,如接收到的、丟棄的或校正的數(shù)據(jù)包數(shù)量。這些計(jì)數(shù)器用于衡量和監(jiān)控性能指標(biāo),包括誤碼率和有效數(shù)據(jù)速率。
總而言之,數(shù)據(jù)作為數(shù)據(jù)包以串行形式發(fā)送和接收。數(shù)據(jù)包攜帶前同步碼和CRC。數(shù)據(jù)在收發(fā)器設(shè)備前的中間正交信號(hào)上經(jīng)過BPSK調(diào)制和解調(diào)。因此,中間信號(hào)頻率和數(shù)據(jù)的位速率是采樣速率的八分之一?;鶐幚砥髂K及上述設(shè)計(jì)細(xì)節(jié)如圖2和3所示。
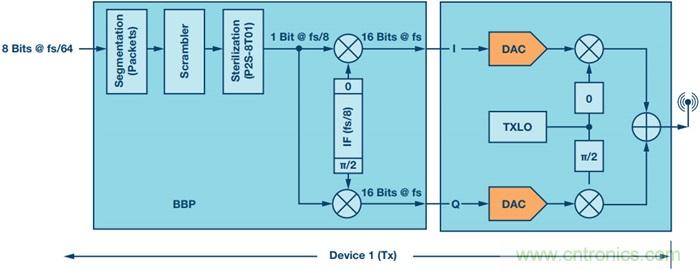
圖2. BBP發(fā)送功能框圖
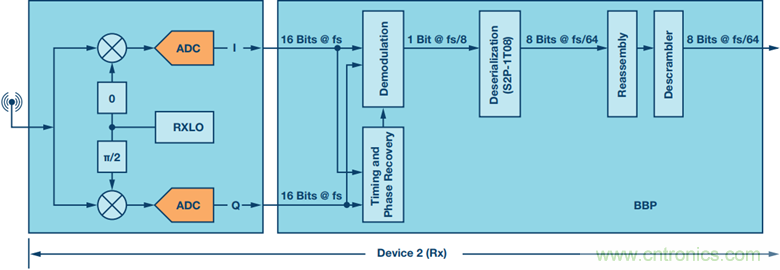
圖3. BBP接收功能框圖
發(fā)送器讀取數(shù)據(jù)字節(jié)(字符寬度),并將其轉(zhuǎn)換為帶有表頭或前同步碼的數(shù)據(jù)包。將CRC添加到數(shù)據(jù)包末端。然后,對(duì)數(shù)據(jù)包數(shù)據(jù)進(jìn)行加擾和串行處理。在連接到收發(fā)器之前,單個(gè)位數(shù)據(jù)相位調(diào)制余弦(I)和正弦(Q)函數(shù)。
在接收方向,離線模塊恢復(fù)并跟蹤時(shí)序間隔和調(diào)制信號(hào)的相對(duì)相位。該信息用于從輸入的ADC樣本中恢復(fù)串行數(shù)據(jù)。然后組裝到數(shù)據(jù)包,并進(jìn)行解擾。在數(shù)據(jù)包結(jié)束時(shí),比較CRC,如果不匹配,則丟棄數(shù)據(jù)包。如果CRC匹配,數(shù)據(jù)傳遞給終端用戶。
實(shí)現(xiàn)
BBP設(shè)計(jì)在硬件中實(shí)施和測(cè)試。硬件是兩個(gè)評(píng)估板的組合:具有Zynq FPGA設(shè)備的Xilinx ZC706評(píng)估板,以及具有AD9361收發(fā)器的AD-FMCOMMS3-EBZ評(píng)估板。ADI提供支持該硬件的完整參考設(shè)計(jì)。該開源設(shè)計(jì)在主要工具版本中免費(fèi)提供,可獲得完全支持和更新。硬件詳細(xì)信息參見下列URL:
ADI參考設(shè)計(jì)是支持Linux®框架的嵌入式系統(tǒng)。包含圍繞ARM®處理器的各種外設(shè)。AD9361設(shè)備連接到 axi_AD9361 IP外設(shè)。它在RF設(shè)備和系統(tǒng)存儲(chǔ)器之間傳輸原始采樣數(shù)據(jù)。
外設(shè)和設(shè)備通過Linux內(nèi)核驅(qū)動(dòng)程序進(jìn)行初始化和控制。BBP則作為連接到 axi_AD9361的另一個(gè)IP外設(shè)。出于歷史原因,BBP IP命名為 axi_xcomm2ip 。Linux中的用戶空間應(yīng)用程序用于在系統(tǒng)之間控制、發(fā)送和接收數(shù)據(jù)。
在ADI參考設(shè)計(jì)中,在發(fā)送方向,axi_AD9361 IP連接到解包模塊(util_upack),在接收方向,連接到打包模塊(util_cpack)。 在發(fā)送方向,BBP數(shù)據(jù)插入解包模塊和AD9361內(nèi)核之間。為了使其不影響默認(rèn)數(shù)據(jù)路徑,BBP支持可選的數(shù)據(jù)路徑多路復(fù)用器,以選擇解包數(shù)據(jù)源或BBP數(shù)據(jù)源。BBP允許參考設(shè)計(jì)數(shù)據(jù)路徑作為默認(rèn)路徑,并僅在啟用時(shí)選擇BBP數(shù)據(jù)源。在接收方向,BBP僅連接到AD9361內(nèi)核。參考設(shè)計(jì)數(shù)據(jù)路徑不受影響。這允許框架不受妨礙地引導(dǎo)和設(shè)置系統(tǒng)。在系統(tǒng)設(shè)置后,啟用BBP,可通過覆蓋默認(rèn)數(shù)據(jù)路徑來進(jìn)行數(shù)據(jù)傳輸。以ADI參考設(shè)計(jì)實(shí)施的BBP的框圖如圖4所示。
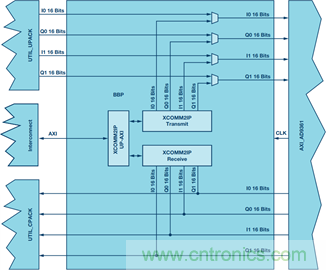
圖4. BBP IP框圖
本文中討論的設(shè)計(jì)、初始化和數(shù)據(jù)傳輸使用一對(duì)這種硬件。設(shè)置僅需一對(duì)HDMI®監(jiān)視器、鍵盤和鼠標(biāo)及天線。系統(tǒng)彼此完全不同步,但需要相同設(shè)置。在每個(gè)方向,數(shù)據(jù)在不同載波上傳輸。設(shè)備1的發(fā)射載波頻率和設(shè)備2的接收載波頻率相同,但在另一個(gè)方向上不同。然而,如果回送中使用單個(gè)設(shè)備,發(fā)射和接收載波必須具有相同的頻率。BBP的HDL設(shè)計(jì)采用ADI庫模塊。
控制(微處理器)接口
AXI-Lite接口用于通過處理器控制和監(jiān)控BBP。使用ADI公共庫(hdl/library/common/up_axi.v)中的up_axi模塊,可以輕松推斷該接口模塊。該模塊將AXI-Lite接口轉(zhuǎn)換為簡(jiǎn)單內(nèi)存,如讀取和寫入總線。和任何其他ADI IP一樣,添加內(nèi)部寄存器和內(nèi)存。寄存器映射如表1所示。
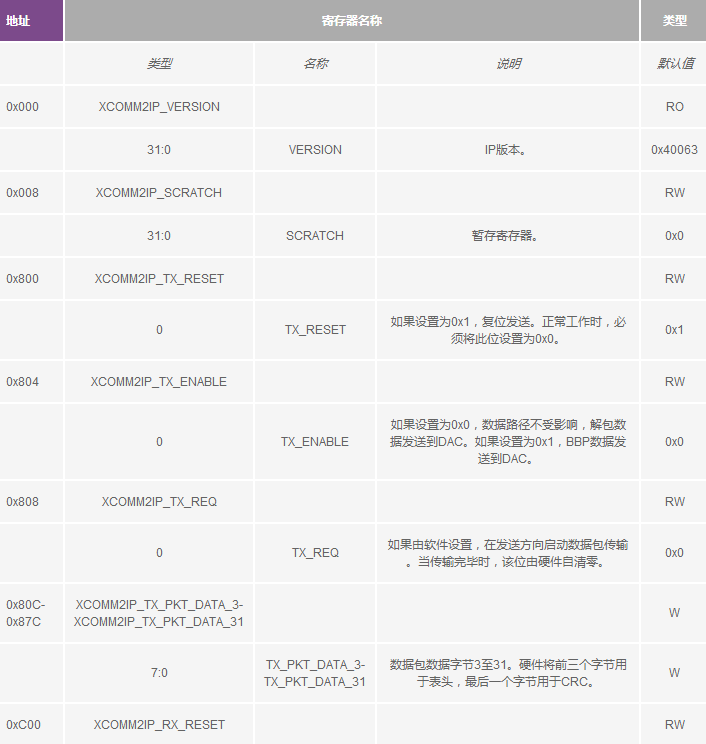

表1. BBP寄存器映射
up_axi: 模塊端口及其端口映射如下所述。
up_rstn: AXI接口復(fù)位(異步低電平有效),連接到 s_axi_aresetn.
up_clk: AXI接口時(shí)鐘,連接到 s_axi_aclk.
up_axi_*: AXI接口信號(hào),連接到等效 s_axi_* 端口
up_wreq, up_waddr, up_wdata, up_wack: 內(nèi)部寫入接口, the up_wreq 信號(hào)與地址和數(shù)據(jù)一同置位,以指示寫入請(qǐng)求。請(qǐng)求需要通過up_wack 端口應(yīng)答。
如下所示,實(shí)施簡(jiǎn)單的寄存器寫入。
always @(negedge up_rstn or posedge up_clk)
begin
if (up_rstn == 0) begin
up_wack <= ''d0;
up_reg0 <= UP_REG0_RESET_VALUE;
end else begin
up_wack <= up_wreq_s;
if ((up_wreq_s == 1''b1) && (up_waddr == UP_ REG0_ADDRESS)) begin
up_reg0 <= up_wdata[UP_REG0_WIDTH-1:0];
end
end
end
模塊在二者之間執(zhí)行地址轉(zhuǎn)換。AXI接口使用字節(jié)地址,但內(nèi)部總線使用DWORD地址。結(jié)果是,up_axi模塊丟棄AXI地址的兩個(gè)最低有效位,以生成內(nèi)部DWORD地址。
up_rreq, up_raddr, up_rdata, up_rack: 內(nèi)部讀取接口, up_rreq 信號(hào)與地址一同置位,以指示讀取請(qǐng)求。請(qǐng)求需要與讀取數(shù)據(jù)一同通過 up_rack 端口應(yīng)答。
如下所示,實(shí)施與上述相同的寄存器用于讀取。
always @(negedge up_rstn or posedge up_clk)
begin
if (up_rstn == 0) begin
up_rack <= ''d0;
up_rdata <= ''d0;
end else begin
up_rack <= up_rreq_s;
if ((up_rreq_s == 1''b1) && (up_raddr == UP_ REG0_ADDRESS)) begin
up_rdata <= up_reg0;
end else begin
up_rdata <= 32''d0;
end
end
end
相同地址轉(zhuǎn)換也適用于讀取。讀取數(shù)據(jù)僅在請(qǐng)求時(shí)驅(qū)動(dòng),否則設(shè)置為零。這是因?yàn)閡p_axi模塊將單個(gè)讀取數(shù)據(jù)從各個(gè)地址組傳遞到OR門。因此,未選擇的地址組需要驅(qū)動(dòng)讀取數(shù)據(jù)零。
如上方寄存器映射表中所列,BBP有三個(gè)地址空間。常見寄存器空間映射至0x000、發(fā)送(DAC)映射至0x800 (0x200),接收(ADC)映射至0xC00 (0x300)。軟件(Linux用戶空間應(yīng)用程序)應(yīng)當(dāng)將發(fā)送數(shù)據(jù)包數(shù)據(jù)寫入緩沖器,并從另一個(gè)緩沖器中讀取接收到的數(shù)據(jù)包數(shù)據(jù)。數(shù)據(jù)包大小選擇為32字節(jié),帶有3字節(jié)前同步碼和1字節(jié)CRC。
數(shù)據(jù)接口
對(duì)于接收和發(fā)送方向的兩個(gè)通道,AD9361接口內(nèi)核包含兩對(duì)16位I/Q數(shù)據(jù)。內(nèi)核按照與AD9361數(shù)字接口相同的時(shí)鐘運(yùn)行。在2R2T模式下,這是采樣速率的4倍。在1R1T模式下,這是采樣速率的2倍。有效數(shù)據(jù)速率由有效信號(hào)控制。因此在2R2T模式下,每4個(gè)時(shí)鐘置位一次有效。在1R1T模式下,每2個(gè)時(shí)鐘置位一次有效。BBP旨在支持2R2T和1R1T模式。它使用單個(gè)發(fā)送和接收通道。內(nèi)部邏輯在2R2T和1R1T模式下以采樣速率運(yùn)行。然后,BBP在其時(shí)鐘頻率下,通過接口內(nèi)核傳輸數(shù)據(jù)。這樣是為了在BBP內(nèi)演示時(shí)鐘轉(zhuǎn)換。在許多情況下,用戶可能希望無論收發(fā)器的接口速率如何,都能在采樣速率下運(yùn)行BBP邏輯。
使用Xilinx基元BUFR和BUFG,生成采樣頻率內(nèi)部時(shí)鐘。BUFR是分壓器,BUFG是高扇出時(shí)鐘緩沖器。為此,也可以使用MMCM。如下所示,生成內(nèi)部時(shí)鐘。
parameter XCOMM2IP_1T1R_OR_2T2R_N = 0; localparam XCOMM2IP_SCLK_DIVIDE = (XCOMM2IP_1T1R_OR_2T2R_N == 1) ? "2" : "4";
BUFR #(.BUFR_DIVIDE(XCOMM2IP_SCLK_DIVIDE)) i_bufr (
.CLR (1''b0),
.CE (1''b1),
.I (clk),
.O (s_clk_s));
BUFG i_bufg (
.I (s_clk_s),
.O (s_clk));
使用BUFR和BUFG可確保時(shí)鐘頻率鎖定,但會(huì)影響相位確定性。最大相位不確定性是單個(gè)接口時(shí)鐘周期。通過帶有同步信號(hào)的四級(jí)寄存器陣列,可以輕松補(bǔ)償該不確定性。然而,設(shè)計(jì)采用了雙端口RAM模塊來實(shí)現(xiàn)數(shù)據(jù)傳輸。這也是為了展示常見信號(hào)處理要求的應(yīng)用實(shí)例。使用ADI庫內(nèi)存模塊(ad_mem)可以推斷出雙端口RAM元件。
發(fā)送接口
在發(fā)送方向,處理器將數(shù)據(jù)包數(shù)據(jù)寫入緩沖器(參見上方寄存器映射表)。然后,請(qǐng)求硬件發(fā)送該數(shù)據(jù)包。BBP將數(shù)據(jù)包連續(xù)發(fā)送給設(shè)備。在數(shù)據(jù)包開始時(shí),檢查是否有任何請(qǐng)求。如果沒有待處理的請(qǐng)求,則發(fā)送空閑數(shù)據(jù)包。如果有請(qǐng)求等待處理,讀取并發(fā)送數(shù)據(jù)包緩沖器。
發(fā)送邏輯使用自由運(yùn)行位計(jì)數(shù)器,按照位寬運(yùn)行。當(dāng)位計(jì)數(shù)器為0x0時(shí),更新緩沖器讀取地址。由于在數(shù)據(jù)包傳輸期間可能會(huì)隨時(shí)出現(xiàn)處理器請(qǐng)求,因此在數(shù)據(jù)包傳輸開始時(shí)會(huì)立即捕獲并清零。在數(shù)據(jù)包傳輸開始時(shí),如果請(qǐng)求等待處理,則應(yīng)答回至處理器接口。利用請(qǐng)求在緩沖器數(shù)據(jù)或空閑數(shù)據(jù)之間進(jìn)行選擇。
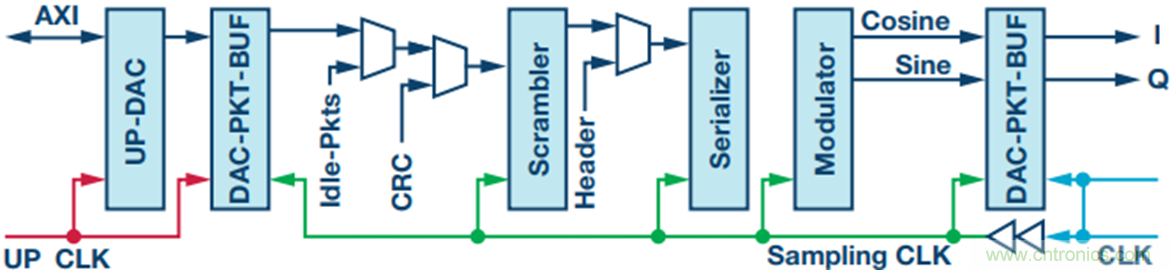
圖5. 發(fā)送數(shù)據(jù)路徑
數(shù)據(jù)包數(shù)據(jù)的前兩個(gè)字節(jié)設(shè)置為0xfff0。第三個(gè)字節(jié)用于表示空閑(0xc5)或數(shù)據(jù)(0xa6)數(shù)據(jù)包。CRC字節(jié)作為數(shù)據(jù)包的最后一個(gè)字節(jié)插入。CRC多項(xiàng)式為x8 + x2 + x + 1。除表頭外的所有字節(jié)已加擾。加擾多項(xiàng)式與SONET/SDH (x7 + x6 + 1)相同。
余弦和正弦查找表用于生成調(diào)制載波。在8個(gè)樣本中,位間隔等于完整的信號(hào)周期(0至2 )。位數(shù)據(jù)用于反轉(zhuǎn)信號(hào)。然后,數(shù)據(jù)寫入小緩沖器,并使用接口時(shí)鐘,根據(jù)AD9361接口內(nèi)核中的有效信號(hào)讀取。
接收接口
在接收方向,針對(duì)表頭模式0xfff0,監(jiān)控I/Q數(shù)據(jù)。這種獨(dú)特的模式在數(shù)據(jù)包傳輸中只出現(xiàn)一次。可以發(fā)送數(shù)據(jù)包數(shù)據(jù),以使加擾器輸出重復(fù)該模式。軟件會(huì)限制并阻止該做法。12個(gè)連續(xù)位間隔的該系列同相數(shù)據(jù)序列用于通過時(shí)序恢復(fù)模塊復(fù)位并跟蹤接收器時(shí)序和相位。因此,將復(fù)位其時(shí)序計(jì)數(shù)器并將其相位值設(shè)置為0x1。該序列后的第一個(gè)反轉(zhuǎn)被視為0x0。在此之后,時(shí)序恢復(fù)模塊在整個(gè)數(shù)據(jù)包傳輸過程中保持其狀態(tài)不變。
數(shù)據(jù)恢復(fù)模塊計(jì)算信號(hào)的平均值,并決定信號(hào)的當(dāng)前相位。然后,與時(shí)序恢復(fù)模塊跟蹤的相對(duì)相位進(jìn)行比較。如果發(fā)生沖突,根據(jù)過去的信號(hào)變化做決定。這是因?yàn)闆_突通常是由相位切換引起的。
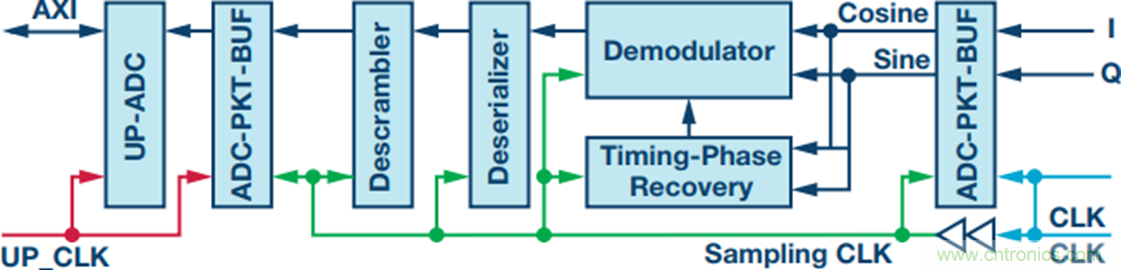
圖6. 接收數(shù)據(jù)路徑
然后,解調(diào)的位數(shù)據(jù)組裝到字節(jié),并進(jìn)行解擾。如果傳輸緩沖器為空,則數(shù)據(jù)寫入傳輸緩沖器。在數(shù)據(jù)包結(jié)束時(shí)驗(yàn)證CRC。如果匹配且傳輸緩沖器已寫入,則通知處理器接口。軟件應(yīng)當(dāng)監(jiān)控該請(qǐng)求,如果已設(shè)置,通過讀取其內(nèi)容來清空緩沖器。然后,必須清除請(qǐng)求,以便繼續(xù)進(jìn)行數(shù)據(jù)包傳輸。
構(gòu)建說明和下載
本文介紹簡(jiǎn)單RF基帶處理器的理論和實(shí)施詳情。討論了在ZC706和AD-FMCOMMS3-EBZ硬件上實(shí)現(xiàn)該設(shè)計(jì)的實(shí)際方案??焖傺菔竞蜆?gòu)建說明的完整設(shè)計(jì)文件參見https://wiki.analog.com/resources/fpga/docs/hdl/xcomm2ip。此頁面也詳細(xì)介紹了HDL設(shè)計(jì)、軟件、RF設(shè)置、性能和分析。
本文轉(zhuǎn)載自亞德諾半導(dǎo)體。
推薦閱讀:



