

【導讀】本文講解的是基于ATMEL單片機的自動扶梯控制系統(tǒng)。該系統(tǒng)主要是由ATmega16a4控制的扶梯系統(tǒng),軟件主要分電機過熱、突發(fā)事件、人流量變化、斷相模塊組成,當電機出現(xiàn)過熱、突發(fā)事件、人流量變化、斷相的現(xiàn)象時,各個檢測單元將檢測到的的信號傳輸給單片機,然后單片機將接收到的信號與各個基準量進行比較,做出判斷。
一、項目概述
1.1 引言
自動扶梯廣泛應(yīng)用于大型商場、超市、機場、地鐵、賓館等場合。大多數(shù)扶梯在客流量大的時候,工作于額定的運行狀態(tài),在沒有乘客時仍以額定速度運行,具有耗能大、機械磨損嚴重、使用壽命低等缺點。采用ATmega16a4為控制芯片的自動自動扶梯將是扶梯的發(fā)展方向。
1.2 項目背景
目前,我國生成的自動扶梯其控制系統(tǒng)基本上可以分為兩大類,即傳統(tǒng)的繼電器控制型和流行的可編程序控制器(PLC)控制型。前者存在有線路繁復、觸點多和易故障等缺點,而后者雖然克服了前者的許多缺點,但需要有專職人員對PLC進行編程。為此,我們開發(fā)了一種比較通用的自動扶梯微機控制器。該控制器主要由ATmega16a4芯片構(gòu)成,它具有接線簡單,使用方便的特點。
二、需求分析
2.1 功能要求
使用了ATmega16a4芯片為核心的控制器,自動扶梯可以實現(xiàn)上下運行、Y/△啟動、控制拽引電機抱閘、監(jiān)視扶手帶速度、控制照明接觸器。
2.2 性能要求
1、電機過熱保護
2、錯項與斷相保護
3、運行狀態(tài)或安全回路故障顯示
4、隨時抱閘監(jiān)視
5、扶手帶速度監(jiān)視
6、Y/△轉(zhuǎn)換選擇
7、自動運行
三、方案設(shè)計
3.1 系統(tǒng)功能實現(xiàn)原理
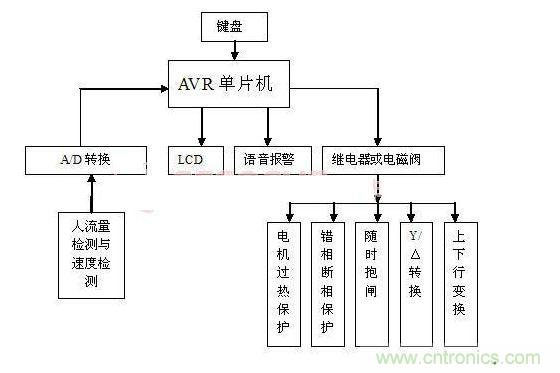
系統(tǒng)硬件結(jié)構(gòu)框圖
系統(tǒng)功能實現(xiàn)原理說明:
扶梯的運行需要一系列的執(zhí)行機構(gòu)來實現(xiàn)。自動扶梯的運行系統(tǒng)主要扶梯的上下行變換、隨時抱閘、錯相短相保護、電機過熱保護、星三角變換、人流量與速度檢測等部分組成。上下行變換就是當給扶梯可以實現(xiàn)上下行之間的切換而不僅僅局限于單方向的運行,提高了扶梯的智能化。隨時抱閘裝置的主要作用就是以防發(fā)生一些事故的時候可以對扶梯實行抱閘操作,使扶梯可以立刻停下來減少損失和對人員帶來的傷害。錯相與斷相保護主要是防止電氣故障給設(shè)備和電力網(wǎng)絡(luò)帶來的損害,電機過熱保護主要是防止當電機長時間運行發(fā)出的熱量使得電機的溫度過高而使得電機燒毀。Y/△變換主要是考慮的人流量他是一個變量,要是扶梯一直以一個不變的速度來運行的話,當人流量大的時候扶梯的運行效率將非常低,所以我們通過人流量的檢測裝置來額人流量,然后反饋給單片機讓單片機作出判斷是否應(yīng)該作出Y/△之間的切換使得扶梯的速度改變,而速度檢測主要是由編碼器來實現(xiàn)的,編碼器將測得的數(shù)據(jù)反饋給單片機,讓單片機知道當前運行的速度是多少。
[page]
3.2 硬件平臺選用及資源配置
ATmega16a4 電機 繼電器 編碼器 傳感器
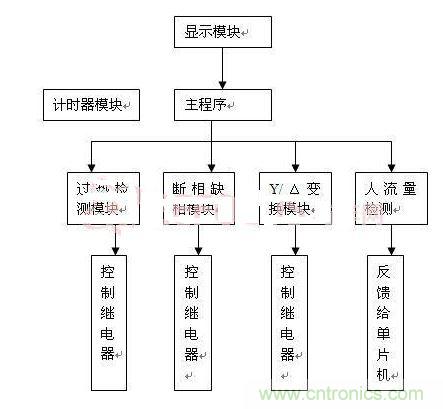
3.3系統(tǒng)軟件架構(gòu)
3.4 系統(tǒng)軟件流程
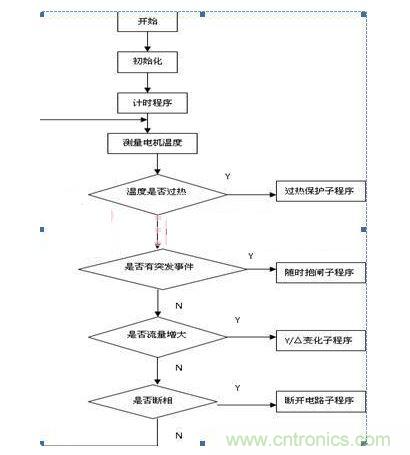
程序運行流程圖
該系統(tǒng)主要是由ATmega16a4控制的扶梯系統(tǒng),軟件主要分電機過熱、突發(fā)事件、人流量變化、斷相模塊組成,當電機出現(xiàn)過熱、突發(fā)事件、人流量變化、斷相的現(xiàn)象時,各個檢測單元將檢測到的的信號傳輸給單片機,然后單片機將接收到的信號與各個基準量進行比較,若單片機檢測到電機的溫度高于當初設(shè)定的值那么單片機就輸出一個信號給電機過熱保護單元,控制線路中的接觸器斷開是的電梯停止運行。當傳感器將檢測到的信息傳送給單片機讓單片機作出判斷,若人流量大于當初設(shè)定的值,單片機控制Y/△變換模塊,使得扶梯的運行速度改變!
3.5 系統(tǒng)預計實現(xiàn)結(jié)果
制作出系統(tǒng)模型,能夠仿真運行,當出現(xiàn)經(jīng)濟情況、缺相斷相時扶梯能夠立即停止運行,當檢測到電機過熱是單片機作出反應(yīng),使得扶梯降低運行速度或者停止運行。當人流量由多變少或者由少多時,單片機作出反應(yīng)控制電梯進行Y/△變換。



