

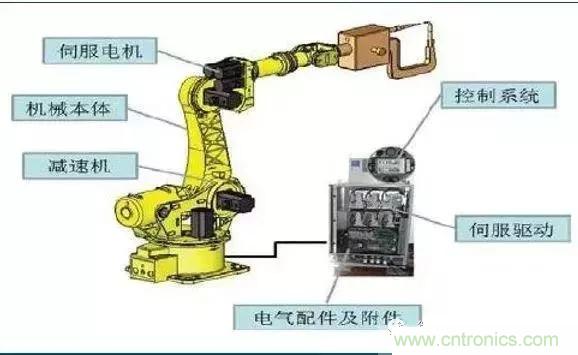
【導(dǎo)讀】工業(yè)機器人廣泛使用在產(chǎn)業(yè)制造上,汽車制造、電器、食品等,能替代反復(fù)機器式操縱工作,是靠本身動力和控制才能來實現(xiàn)種種功用的一種機器。它能夠承受人類指揮,也能夠按照事先編排的程序運轉(zhuǎn)。如今我們講講工業(yè)機器人基本主要構(gòu)成部分。
1.主體
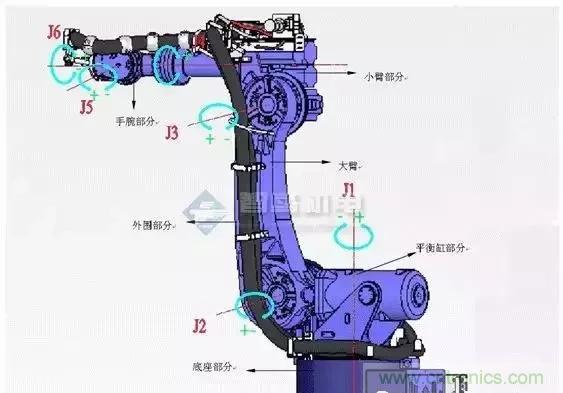
主體機械即機座和實行機構(gòu),包括大臂、小臂、腕部和手部,構(gòu)成的多自由度的機械系統(tǒng)。有的機器人另有行走機構(gòu)。工業(yè)機器人有6個自由度乃至更多腕部通俗有1~3個活動自由度。
2.驅(qū)動系統(tǒng)
工業(yè)機器人的驅(qū)動系統(tǒng),按動力源分為液壓,氣動和電動三大類。依據(jù)需求也可由這三種范例組合并復(fù)合式的驅(qū)動系統(tǒng)。或者通過同步帶、輪系、齒輪等機械傳動機構(gòu)來間接驅(qū)動。驅(qū)動系統(tǒng)有動力裝置和傳動機構(gòu),用以實行機構(gòu)發(fā)生相應(yīng)的動作,這三類根本驅(qū)動系統(tǒng)的各有特點,現(xiàn)在主流的是電動驅(qū)動系統(tǒng)。
由于低慣量,大轉(zhuǎn)矩交、直流伺服電機及其配套的伺服驅(qū)動器(交換變頻器、直流脈沖寬度調(diào)制器)的普遍接納。這類系統(tǒng)不需能量轉(zhuǎn)換,運用方便,控制靈敏。大多數(shù)電機后面需安裝精細的傳動機構(gòu):減速器。其齒運用齒輪的速率轉(zhuǎn)換器,將電機的反轉(zhuǎn)數(shù)減速到所要的反轉(zhuǎn)數(shù),并得到較大轉(zhuǎn)矩的裝置,從而降低轉(zhuǎn)速,添加轉(zhuǎn)矩,當(dāng)負載較大時,一味提升伺服電機的功率是很不劃算的,能夠在適宜的速率范疇內(nèi)通過減速器來進步輸出扭矩。伺服電機在低頻運轉(zhuǎn)下容易發(fā)熱和出現(xiàn)低頻振動,長時間和重復(fù)性的工作不利于確保其準確性、牢靠地運轉(zhuǎn)。精細減速電機的存在使伺服電機在一個適宜的速率下運轉(zhuǎn),加強機器體剛性的同時輸出更大的力矩。如今主流的減速器有兩種:諧波減速器和RV減速

3.控制系統(tǒng)
機器人控制系統(tǒng)是機器人的大腦,是決定機器人功用和功能的主要要素??刂葡到y(tǒng)是按照輸入的程序?qū)︱?qū)動系統(tǒng)和實行機構(gòu)收回指令信號,并進行控制。工業(yè)機器人控制技術(shù)的主要任務(wù)便是控制工業(yè)機器人在工作空間中的活動范圍、姿勢和軌跡、動作的時間等。具有編程簡單、軟件菜單操縱、友好的人機交互界面、在線操縱提示和運用方便等特點。
控制器系統(tǒng)是機器人的中心,外國有關(guān)公司對我國實驗緊密封閉。連年來隨著微電子技術(shù)的開展,微處置器的功能越來越高,而價錢則越來越便宜,現(xiàn)在市集上曾經(jīng)出現(xiàn)了1-2美金的32位微處置器。高性價比的微處置器為機器人控制器帶來了新的開展機會,使開辟低本錢、高功能的機器人控制器成為可能。為了使系統(tǒng)具有充足的運算與存儲能力,現(xiàn)在機器人控制器多接納較強的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片構(gòu)成。
由于已有的通用芯片功用及功能上不可以完全滿足有些機器人系統(tǒng)在價錢、功能、集成度和接口等方面的要求,這就萌生了機器人系統(tǒng)對SoC(Systemon Chip)技能的需求,將特定的處置器與所需求的接口集成在一同,可簡化系統(tǒng)外圍電路的設(shè)計,減少系統(tǒng)尺寸,并低低成本。比方,Actel公司將NEOS或ARM7的處置器內(nèi)核集成在其FPGA產(chǎn)品上,構(gòu)成了一個完整的SoC系統(tǒng)。在機器人技術(shù)控制器方面,其研討主要會合在美國和日本,并有成熟的成品,如美國DELTATAU公司、日本朋立株式會社等。其運動控制器以DSP技術(shù)為核心,采用基于PC的開放式結(jié)構(gòu)。
4.感知系統(tǒng)
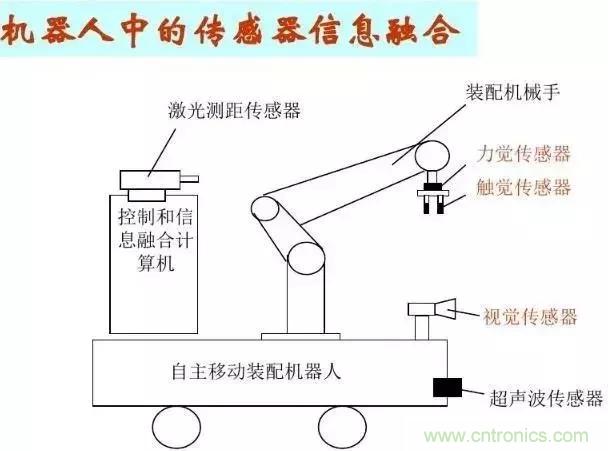
它是內(nèi)部傳感器模塊和外部傳感器模塊的構(gòu)成,獲取內(nèi)部和外部的環(huán)境狀態(tài)中有意義的信息。
內(nèi)部傳感器:用來檢測機器人本身狀態(tài)(如手臂間的角度)的傳感器,多為檢測位置和角度的傳感器。具體有:位置傳感器、位置傳感器、角度傳感器等。
外部傳感器:用來檢測機器人所處環(huán)境(如檢測物體,距離物體的距離)及狀況(如檢測抓取的物體是否滑落)的傳感器。具體有距離傳感器、視覺傳感器、力覺傳感器等。
智能傳感系統(tǒng)的使用提高了機器人的機動性,實用性和智能化的標準,人類的感知系統(tǒng)對外部世界信息是機器人靈巧的,然而,對于一些特許的信息,傳感器比人的系統(tǒng)更加有效。
5.末端執(zhí)行器
末端執(zhí)行器連接在機械手最后一個關(guān)節(jié)上的部件,它一般用來抓取物體,與其他機構(gòu)連接并執(zhí)行需要的任務(wù)。機器人制造上一般不設(shè)計或出售末端執(zhí)行器,多數(shù)情況下,他們只提供一個簡單的抓持器。通常末端執(zhí)行器安裝在機器人6軸的法蘭盤上以完成給定環(huán)境中的任務(wù),如焊接,噴漆,涂膠以及零件裝卸等就是需要機器人來完成的任務(wù)。

伺服電機的概述
伺服驅(qū)動器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統(tǒng)的一部分。一般是通過位置、速度和力矩三種方式對伺服電機進行控制,實現(xiàn)高精度的傳動系統(tǒng)定位。
一、伺服電機的分類
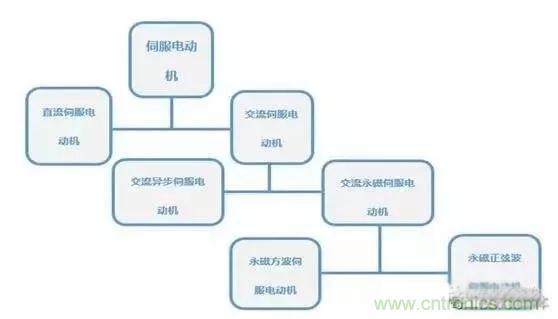
分為直流和交流伺服電動機兩大類,交流伺服電動機又分為異步伺服電動機和同步伺服電動機,目前交流系統(tǒng)正在逐漸代替直流系統(tǒng)。與直流系統(tǒng)相比,交流伺服電機具有高可靠性、散熱好、轉(zhuǎn)動慣量小、能工作于高壓狀態(tài)下等優(yōu)點。因為無電刷和轉(zhuǎn)向器,故交流私服系統(tǒng)也成為無刷伺服系統(tǒng),用于其中的電機是無刷結(jié)構(gòu)的籠型異步電機和永磁同步型電機。
1)直流伺服電機分為有刷和無刷電機
①有刷電機成本低,結(jié)構(gòu)簡單,啟動轉(zhuǎn)矩大,調(diào)速范圍寬,控制容易,需要維護,但維護方便(換碳刷),產(chǎn)生電磁干擾,對使用環(huán)境有要求,通常用于對成本敏感的普通工業(yè)和民用場合;
②無刷電機體積小重量輕,出力大響應(yīng)快,速度高慣量小,力矩穩(wěn)定轉(zhuǎn)動平滑,控制復(fù)雜,智能化,電子換相方式靈活,可以方波或正弦波換相,電機免維護,高效節(jié)能,電磁輻射小,溫升低壽命長,適用于各種環(huán)境。
二、不同類型伺服電機的特點
1)直流伺服電機的優(yōu)點和缺點
優(yōu)點:速度控制精確,轉(zhuǎn)矩速度特性很硬,控制原理簡單,使用方便,價格便宜。
缺點:電刷換向,速度限制,附加阻力,產(chǎn)生磨損微粒(無塵易爆環(huán)境不宜)
2)交流伺服電機的優(yōu)點和缺點
優(yōu)點:速度控制特性良好,在整個速度區(qū)內(nèi)可實現(xiàn)平滑控制,幾乎無振蕩,90%以上的高效率,發(fā)熱少,高速控制,高精確度位置控制(取決于編碼器精度),額定運行區(qū)域內(nèi),可實現(xiàn)恒力矩,慣量低,低噪音,無電刷磨損,免維護(適用于無塵、易爆環(huán)境)。
缺點:控制較復(fù)雜,驅(qū)動器參數(shù)需要現(xiàn)場調(diào)整PID參數(shù)確定,需要更多的連線。
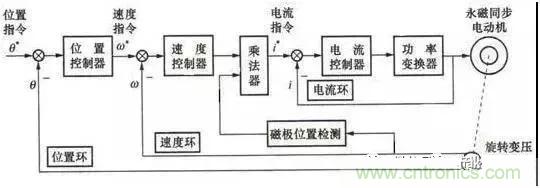
目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心,可以實現(xiàn)比較復(fù)雜的控制算法,實現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心設(shè)計的驅(qū)動電路,IPM內(nèi)部集成了驅(qū)動電路,同時具有過電壓、過電流、過熱、欠壓等故障檢測保護電路,在主回路中還加入軟啟動電路,以減小啟動過程對驅(qū)動器的沖擊。功率驅(qū)動單元首先通過三相全橋整流電路對輸入的三相電或者市電進行整流,得到相應(yīng)的直流電。經(jīng)過整流好的三相電或市電,再通過三相正弦PWM電壓型逆變器變頻來驅(qū)動三相永磁式同步交流伺服電機。功率驅(qū)動單元的整個過程可以簡單的說就是AC-DC-AC的過程。整流單元(AC-DC)主要的拓撲電路是三相全橋不控整流電路。
三、伺服系統(tǒng)接線圖
1.驅(qū)動器接線

伺服驅(qū)動器主要有控制回路電源、主控制回路電源、伺服輸出電源、控制器輸入CN1、編碼器接口CN2、連接起CN3??刂苹芈冯娫词菃蜗郃C電源,輸入電源可單相、三相,但是必須是220v,就是說三相輸入時,咱們的三相電源必須經(jīng)過變壓器變壓才能接,對于功率較小的驅(qū)動器,可單相直接驅(qū)動,單相接法必須接R、S端子。伺服電機輸出U、V、W切記千萬不能與主電路電源連接,有可能燒毀驅(qū)動器。CN1端口主要用于上位機控制器的連接,提供輸入、輸出、編碼器ABZ三相輸出、各種監(jiān)控信號的模擬量輸出。
2 編碼器接線
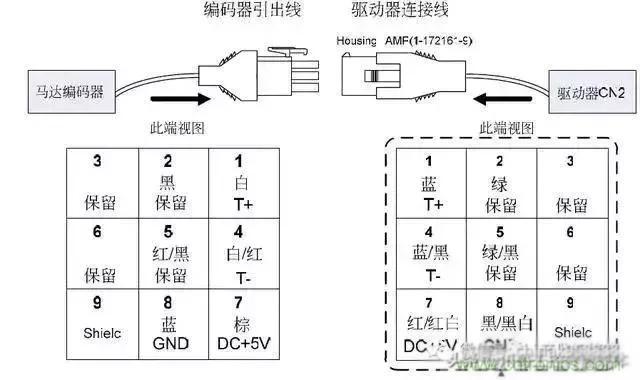
從上圖看出九個端子我們只使用了5個,一個屏蔽線、電源線兩根、串行通訊信號(+-)兩根,與我們普通的編碼器接線差不多。
03 通訊端口
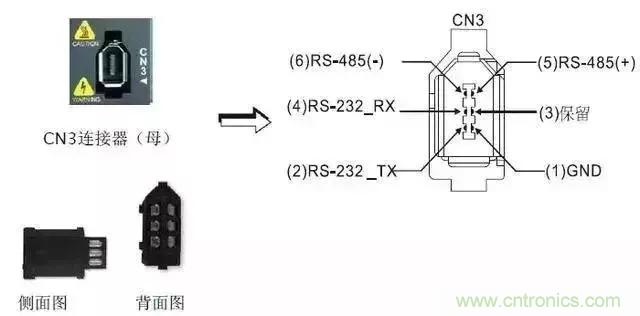
驅(qū)動器通過CN3端口與電腦PLC、HMI等上位機相連接,采用MODBUS通訊來控制驅(qū)動器,可使用RS232、RS485進行通訊。
四、伺服驅(qū)動器市場
機器人對關(guān)節(jié)驅(qū)動電機的要求非常嚴格,交流伺服電機在工業(yè)機器人中得到廣泛應(yīng)用。目前國內(nèi)高端市場主要被國外名企占據(jù),主要來自日本和歐美,未來國產(chǎn)替代空間大。目前國外品牌占據(jù)了中國交流伺服市場近80%的市場份額,主要來自日本和歐美。其中,日系產(chǎn)品以約50%的市場份額居首,其著名品牌包括松下、三菱電機、安川、三洋、富士等,其產(chǎn)品特點是技術(shù)和性能水平比較符合中國用戶的需求,以良好的性價比和較高的可靠性獲得了穩(wěn)定且持續(xù)的客戶源,在中小型OEM市場上尤其具有壟斷優(yōu)勢。
精密減速器
最近看了一則新聞:機器人產(chǎn)業(yè)要破除“卡脖子”難題,感觸挺深。隨著人工成本的提高,工業(yè)機器人替換人已成為趨勢。工業(yè)機器人作為智能制造的基石,但核心零部件卻制約著我國機器人產(chǎn)業(yè)的發(fā)展,據(jù)相關(guān)調(diào)查顯示目前國內(nèi)機器人減速器普通依賴進口。機器人產(chǎn)業(yè)在中國要成氣候,必須下決心解決核心零部件的問題。
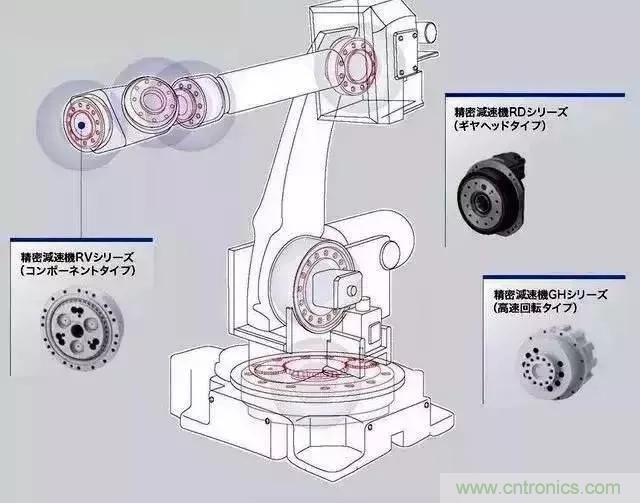
下面介紹工業(yè)機器人核心精密零部件:減速器,與通用減速器相比,機器人用減速器要求具有傳動鏈短、體積小、功率大、質(zhì)量輕和易于控制等特點。減速器行業(yè),我們不得不提這行業(yè)兩巨頭是Nabtesco(帝人,也叫納博特斯克)和Hamonica Drive(哈默納科),業(yè)界俗稱(RV減速器和諧波減器)。他們幾乎壟斷了全球的機器人用減速器。這兩種減速器都是微米級的加工精度,光這一條在量產(chǎn)階段可靠性高就很難了,更別說幾千轉(zhuǎn)的高速運轉(zhuǎn),而且還要高壽命。目前市面上的大量應(yīng)用在工業(yè)機器人上的減速器主要有兩類:RV減速器和諧波減速器。
RV減速器:是少齒差嚙合,但相對于諧波減速器,RV減速器通常用的是擺線針輪,RV減速器由擺線針輪和行星支架組成。相比諧波減速器,RV減速器的關(guān)鍵在于加工工藝和裝配工藝。RV減速器具有更高的疲勞強度、剛度和壽命,不像諧波傳動那樣隨著使用時間增長,運動精度會顯著降低,其缺點是重量重,外形尺寸較大。RV減速器用于轉(zhuǎn)矩大的機器人腿部腰部和肘部三個關(guān)節(jié),負載大的工業(yè)機器人,一二三軸都是用RV減速器。
它較機器人中常用的諧波傳動具有高得多的疲勞強度、剛度和壽命,而且回差精度穩(wěn)定,不像諧波傳動那樣隨著使用時間增長運動精度就會顯著降低,故世界上許多國家高精度機器人傳動多采用RV減速器,因此,該種RV減速器在先進機器人傳動中有逐漸取代諧波減速器的發(fā)展趨勢。
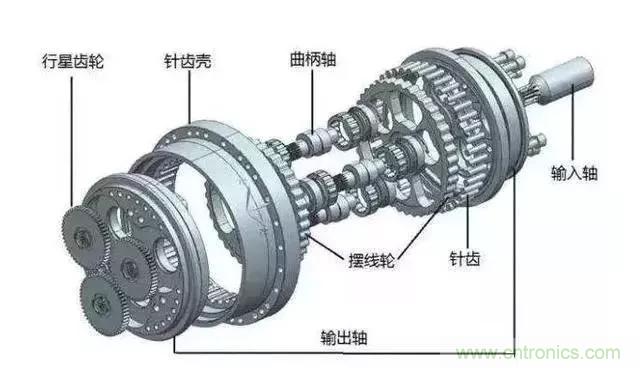
RV減速器分解圖
諧波減速器:用的也是少齒差嚙合,諧波里的一種關(guān)鍵齒輪是柔性的,它需要反復(fù)的高速變形,所以它比較脆弱,承載力和壽命都有限。
諧波減速器是諧波傳動裝置的一種,諧波傳動裝置包括諧波加速器和諧波減速器。諧波減速器主要包括:剛輪、柔輪、和徑向變形的波發(fā)生器三者組成。它是利用柔性齒輪產(chǎn)生可控制的彈性變形波,引起剛輪與柔輪的齒間相對錯齒來傳遞動力和運動。這種傳動與一般的齒輪傳遞具有本質(zhì)上的差別,在嚙合理論、集合計算和結(jié)構(gòu)設(shè)計方面具有特殊性。諧波齒輪減速器具有高精度、高承載力等優(yōu)點,和普通減速器相比,由于使用的材料要少50%,其體積及重量至少減少1/3。所以諧波減速機主用于小型機器人,特點是體積小、重量輕、承載能力大、運動精度高,單級傳動比大。一般用于負載小的工業(yè)機器人或大型機器人末端幾個軸。

諧波減速器分解圖
日本納博特斯克公司從1980年代初提出RV型設(shè)計到1986年RV減速器研究獲得實質(zhì)性突破,花了6-7年時間;而國內(nèi)率先拿出結(jié)果的南通振康和恒豐泰花費時間也為6-8年。是不是意味著我國本土企業(yè)就沒什么機會了呢!可喜的是中國企業(yè)布局若干年后,終于取得一些突破。國產(chǎn)主要由南通振康、秦川機床、武漢精華、浙江恒豐泰和浙江雙環(huán)傳動提供。據(jù)說南通振康產(chǎn)量已經(jīng)突破萬臺,秦川機床生產(chǎn)線已經(jīng)打通,產(chǎn)量正在逐步上升。秦川機床的是國家進口替代項目,秦川機床9萬套工業(yè)機器人關(guān)節(jié)減速器技術(shù)改造項目、工業(yè)機器人關(guān)節(jié)減速器生產(chǎn)線兩項合計投資3.14億元。
控制系統(tǒng)
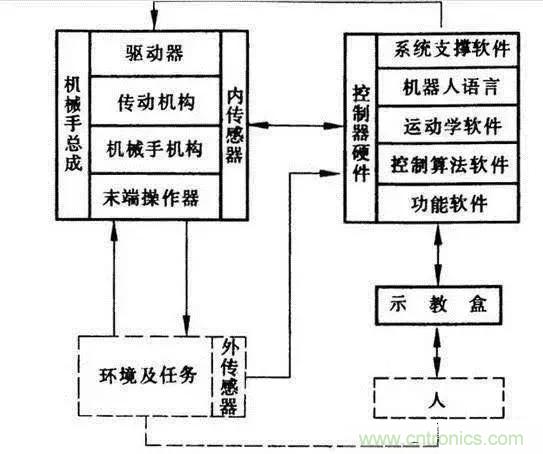
機器人控制系統(tǒng)是機器人的大腦,是決定機器人功用和功能的主要要素。控制系統(tǒng)是按照輸入的程序?qū)︱?qū)動系統(tǒng)和實行機構(gòu)收回指令信號,并進行控制。下面文章主要介紹機器人控制系統(tǒng)。
1、機器人的控制系統(tǒng)
“控制”的目的是指被控對象會按照者所期望的方式產(chǎn)生行為。 “控制”的基本條件是了解被控對象的特性。
“實質(zhì)”是對驅(qū)動器輸出力矩的控制。機器人的控制系統(tǒng)
2、機器人的基本工作原理
工作原理是示教再現(xiàn);示教也稱導(dǎo)引示教,既是人工導(dǎo)引機器人,一步步按實際需求動作流程操作一遍,機器人在導(dǎo)引過程中自動記憶示教的每個動作的姿態(tài)、位置、工藝參數(shù)、運動參數(shù)等,并自動生成一個連續(xù)執(zhí)行的程序。完成示教后,只需要給機器人一個啟動命令,機器人將會地自動按照示教好的動作,完成全部流程;
3、機器人控制的分類
1)按照有無反饋分為:開環(huán)控制、閉環(huán)控制、
開環(huán)精確控制的條件:精確地知道被控對象的模型,并且這一模型在控制過程中保持不變。
2)按照期望控制量分為:力控制、位置控制、混合控制這三種。
位置控制分為:單關(guān)節(jié)位置控制(位置反饋,位置速度反饋,位置速度加速度反饋)、多關(guān)節(jié)位置控制
多關(guān)節(jié)位置控制分為分解運動控制、集中控制力控制分為:直接力控制、阻抗控制、力位混合控制
3)智能化的控制方式
模糊控制、自適應(yīng)控制、最優(yōu)控制、神經(jīng)網(wǎng)絡(luò)控制、模糊神經(jīng)網(wǎng)絡(luò)控制 、專家控制
4、控制系統(tǒng)硬件配置及結(jié)構(gòu) .電氣硬件 .軟件架構(gòu)
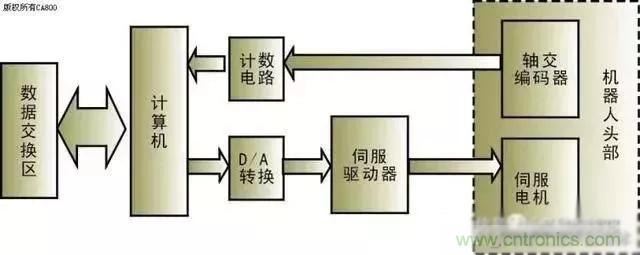
由于機器人的控制過程中涉及大量的坐標變換和插補運算以及較低層的實時控制。所以,目前市面上機器人控制系統(tǒng)在結(jié)構(gòu)上大部分采用分層結(jié)構(gòu)的微型計算機控制系統(tǒng),通常采用的是兩級計算機伺服控制系統(tǒng)。
1)具體流程:
主控計算機接到工作人員輸入的作業(yè)指令后,首先分析解釋指令,確定手的運動參數(shù)。 然后進行運動學(xué)、動力學(xué)和插補運算,最后得出機器人各個關(guān)節(jié)的協(xié)調(diào)運動參數(shù)。 這些參數(shù)經(jīng)過通信線路輸出到伺服控制級,作為各個關(guān)節(jié)伺服控制系統(tǒng)的給定信號。 關(guān)節(jié)上的伺服驅(qū)動器將此信號D/A轉(zhuǎn)換后驅(qū)動各個關(guān)節(jié)產(chǎn)生協(xié)調(diào)運動。
傳感器將各個關(guān)節(jié)的運動輸出信號反饋回伺服控制級計算機形成局部閉環(huán)控制,達到精確的控制機器人在空間的運動。
2)基于PLC的運動控制 兩種控制方式:
①利用PLC的輸出端口使用脈沖指令來產(chǎn)生脈沖驅(qū)動電機,同時使用通用I/O或者計數(shù)零部件來實現(xiàn)伺服電機的閉環(huán)位置控制
②使用PLC外部擴展的位置控制模塊來實現(xiàn)電機的閉環(huán)位置控制,這種方式主要是以發(fā)高速脈沖控制,屬于位置控制方式,位置控制一般都是點到點的位置控制方式較多。
機器人重要參數(shù)
本文重點介紹工業(yè)機器人技術(shù)參數(shù),圖文描述非常詳細,希望能對大家?guī)韼椭。?/div>


機器人的技術(shù)參數(shù)反映了機器人可勝任的工作、具有的最高操作性能等情況,是設(shè)計、應(yīng)用機器人必須考慮的問題。機器人的主要技術(shù)參數(shù)有自由度、分辨率、工作空間、工作速度、工作載荷等。
1、自由度
.是指機器人具有的獨立運動的坐標軸數(shù)量。
.機器人的自由度是指確定機器人手部在空間的位置和姿態(tài)時所需要的獨立運動參數(shù)的數(shù)量。 機器人的自由度數(shù)一般等于關(guān)節(jié)數(shù)量。
.常見機器人自由度數(shù)一般有5~6個。有些機器人還附帶有外部軸。
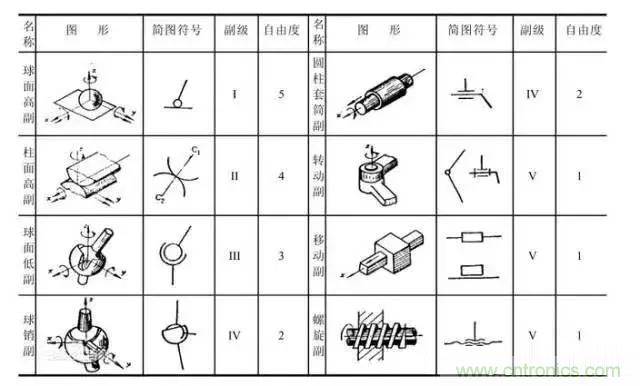
2、關(guān)節(jié)(Joint)
即運動副,允許機器人手臂各零件之間發(fā)生相對運動的機構(gòu)。
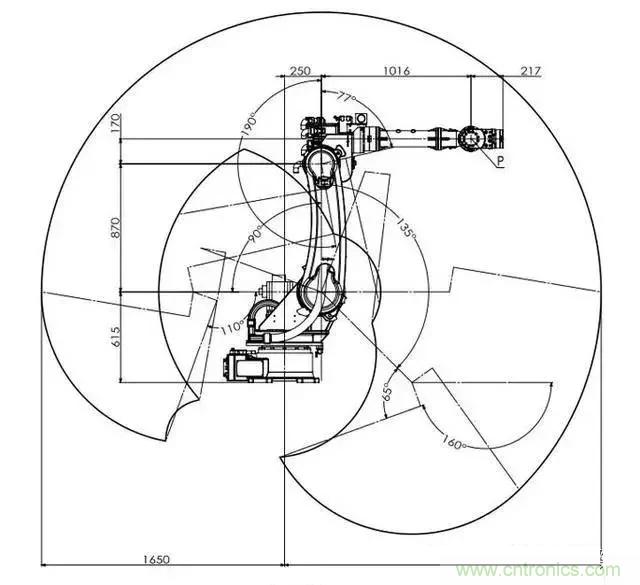
3、工作范圍
工業(yè)機器人手臂或手部安裝點所能達到的所有空間范圍。
其形狀取決于機器人的自由度數(shù)和各運動關(guān)節(jié)的類型與配置。 機器人的工作范圍一般有:圖解法和解析法這兩種方法表示。
4、速度
機器人在工作過程中帶載荷條件下、勻速運動過程時,機械接口中心或工具中心點在單位時間內(nèi)所移動的距離或轉(zhuǎn)動的角度。
5、工作負載
是指機器人手腕前端安裝負荷在工作范圍內(nèi)任何位置上所能承受的最大重量,一般用質(zhì)量、力矩、慣性矩表示。
還和運行速度和加速度大小等參數(shù)有關(guān),工作負載一般用高速運行時機器人所能抓取的工件重量作為負載承受能力為指標。
搬運機器人的負荷重量,必須考慮抓手和工件的合計。
6、分辨率
是指機器人能夠?qū)崿F(xiàn)的最小移動距離或最小轉(zhuǎn)動角度 。
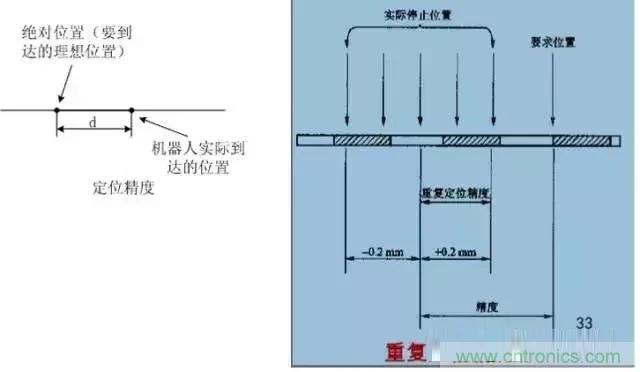
7、精度
重復(fù)性或重復(fù)定位精度:指機器人重復(fù)到達某一目標位置的差異性。比如你要求一個軸走 100 mm 結(jié)果 第一次 實際上他走了 100.01 重復(fù)一次同樣的動作 他走了99.99 這之間的誤差 0.02 就是重復(fù)定位精度。它是衡量一列誤差值的集中程度,即重復(fù)度。機器人精度機不單取決與關(guān)節(jié)減速機及傳動裝置,且對機械裝配工藝存在很大關(guān)系,很多由于裝配不到位導(dǎo)致機器人重復(fù)定位精度下降。



