

【導讀】文章將介紹有效使用單片機外設功能的結(jié)構(gòu)及使用方法,能讓我們將能學到各種單片機共通的基本外設功能,并可廣泛應用到各個方面。單片機僅靠CPU和內(nèi)存是無法運行的!本文介紹GPIO和串行通信。
有效使用單片機不可或缺的“外設功能”是什么呢?正如過去連載的“單片機入門”系列中所介紹的那樣,對電子產(chǎn)品進行控制的單片機是由CPU、內(nèi)存及外設功能等部分組成的(圖1)。CPU根據(jù)指令(程序),執(zhí)行運算、數(shù)據(jù)的讀寫以及進行條件判斷等,而內(nèi)存則用來保存該程序(記憶)。
外設功能是指為了使單片機便于使用的各種功能。例如,CPU為了與外部的傳感器及開關(guān)等進行信號交換,就需要“輸入/輸出端口(I/O端口)”這種外設功能。
而且,將模擬輸入信號轉(zhuǎn)換為數(shù)字值的“A/D轉(zhuǎn)換器”以及反過來將數(shù)字值轉(zhuǎn)換為模擬輸出信號的“D/A轉(zhuǎn)換器”則是單片機對各種信號進行處理時不可或缺的外設功能。
另外,還有為了正確測量時間所用的“定時器”以及提供日期和時計的“實時時鐘(RTC)”,用于進行與時間相關(guān)的處理,此外還有將并行信號(parallel signal)和串行信號(serial signal)進行互相交換的“UART(Universal Asynchronous Receiver Transmitter,通用異步收發(fā)器)”等,以便進行通信。
本連載中,將以瑞薩電子單片機--RX63N為例,介紹令單片機更便于使用的外設功能的基礎(chǔ)知識。我們將使用搭載了“RX63N”程序的電子板“GR-SAKURA”進行說明,請你也實際操作試試看吧!

了解數(shù)字信號的輸入/輸出端口---“GPIO”
在“輸入/輸出端口(I/O端口)”中,數(shù)字信號的輸入/輸出端口即“GPIO(General Purpose Input/Output)”也被稱為“通用I/O端口”,是一種用于數(shù)字信號輸入/輸出的非常方便的端口。用于將數(shù)字輸出的傳感器值和開關(guān)的ON/OFF值傳送到單片機的輸入端及通過LED來顯示單片機的運算結(jié)果,以及輸出用于驅(qū)動電機運行的信號等等。
GPIO被稱為通用端口是其引腳既可以用于輸入也可以用于輸出。在早期的單片機中,引腳都被固定用于輸入或輸出,但是現(xiàn)在很多單片機中都可以自由地將其設定為輸入或輸出端口。假設GPIO端子有8個引腳,則可以將4個引腳用于輸入,另4個引腳用于輸出,也可以將1個引腳用于輸入,剩下的7個引腳用于輸出。
在GPIO中,為了使CPU和外部設備之間進行數(shù)據(jù)交換,要相互執(zhí)行通過程序處理的數(shù)字值(0或1)與信號(電壓的LOW電平或HIGH電平)的轉(zhuǎn)換。下面是作為RX63N單片機的GPIO端口基礎(chǔ)的寄存器(※1)的作用(圖2)。
(※1)寄存器(Register):存在于單片機的CPU和外設功能內(nèi)部中的記憶回路。用于運算和保持CPU的執(zhí)行狀態(tài)。由于是作為CPU及外設功能的內(nèi)部回路,所以在對內(nèi)存進行寫入和讀取時速度很快,但容量卻非常小,既有可以用于各種用途的寄存器(通用寄存器),又有用于某些限定的功能和用途的特殊寄存器。
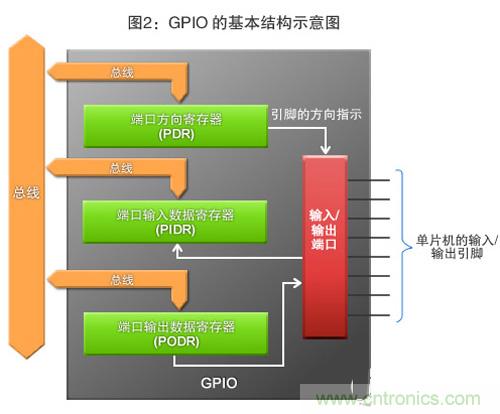
端口方向寄存器(PDR)
決定引腳方向的寄存器,也稱為“方向寄存器”。
端口輸入數(shù)據(jù)寄存器(PIDR)
輸入時反映所使用的引腳狀態(tài)的寄存器。從引腳輸入LOW電平或者HIGH電平時會將之轉(zhuǎn)換為0或1的值并讀取該轉(zhuǎn)換結(jié)果。隨著引腳的變化數(shù)值也將發(fā)生變化。所以不會保持讀取時的值。
端口輸出數(shù)據(jù)寄存器(PODR)
此寄存器保存用作輸出引腳的輸出數(shù)據(jù)。將0或1的值轉(zhuǎn)換為LOW電平或HIGH電平信號并從引腳輸出。由于可以與內(nèi)存一樣保持改寫前的值,所以在改寫前來自引腳的輸出電壓也將保持不變。
通過GR-SAKURA來體驗活用了GPIO的程序!
本期我們將通過“按下開關(guān)時LED會發(fā)光”這個程序來學習GPIO的運行。我們將利用GR-SAKURA專用的程序庫進行編程。(櫻花程序庫的“數(shù)字I/O”)
在櫻花程序庫(SAKURA Library)的“數(shù)字I/O”中,電路板上的I/O專用引腳究竟是用作輸入還是用作輸出最初由pinMode(引腳號、模式)函數(shù)來指定。一旦指定后,只要引腳的用法沒發(fā)生變化就無需執(zhí)行pinMode函數(shù)。
用作輸入時,通過digitalRead函數(shù)來指定引腳號,結(jié)果將被作為HIGH電平或LOW電平信號被返送回。用作輸出時通過digitalWrite函數(shù)來指定引腳號。值還是HIGH電平或LOW電平,HIGH電平相當于1,LOW電平相當于0,所以也可將之記述為0或1。
由于這次使用的是GR-SAKURA電路板上的開關(guān)和LED,所以即使不知道與其相連的引腳號和端口號,如為開關(guān),只需在程序中寫入“PIN_SW”,如為LED,只需在程序中寫入“PIN_LED0”?“PIN_LED3”,櫻花程序庫(SAKURA Library)就會進行處理。
圖3所示的是使用GPIO時,通過LED的閃爍來反映開關(guān)的值的程序例。首先通過pinMode函數(shù)來指定與開關(guān)相連的引腳作為輸入引腳,將與LED連接的引腳作為輸出引腳(①)。只需在開始時定義一次就夠了,之后將在setup函數(shù)中進行處理。
接下來,“只要按下開關(guān)LED就點亮,不按開關(guān)LED就熄滅”的部分在loop函數(shù)中進行處理。開關(guān)是否被按下要根據(jù)digitalRead(PIN_SW)返回的值來判斷。所以GR-SAKURA的開關(guān)在什么都不做(松開)的狀態(tài)下為HIGH電平(通過上拉電阻連接電源),被按下時為LOW電平(連接GND)。
如果digitalRead(PIN_SW)返回的值為LOW電平時=開關(guān)被按下(②)、LED將被點亮。D1的LED為digitalWrite(PIN_LED0, HIGH)時將被點亮(③)。
如果判斷為開關(guān)沒被按下時,當是digitalWrite(PIN_LED0, LOW)時(④),GPIO的輸出為LOW電平,LED熄滅。
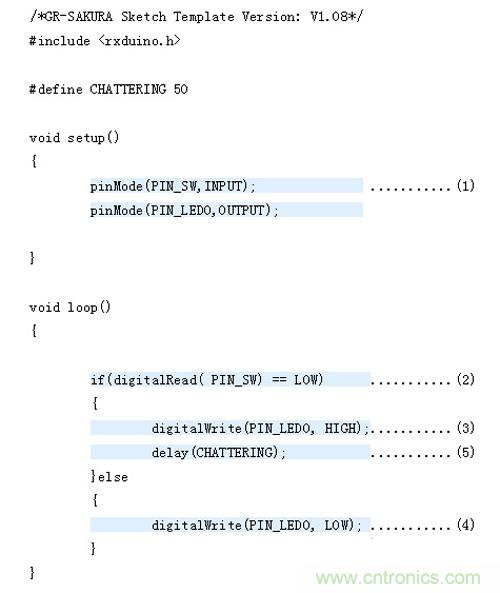
圖3:程序例
請試著使用GR-SAKURA的Web編譯器來執(zhí)行圖4所示的程序。Web編譯器的使用方法請參考嵌入系統(tǒng)入門系列的“第一次挑戰(zhàn)制作!
程序的提示 通過“振蕩”來防止誤操作
開關(guān)是用來接通(開關(guān)有時顯示為“關(guān)”)和切斷(開關(guān)有時顯示為“開”)電路的,即開和關(guān)。在開關(guān)等裝置機械地進行開和關(guān)的操作時,任何一種狀態(tài)都不可能在一瞬間完成。裝置會發(fā)生非??焖俚恼駝?,并非常精細地在開和關(guān)之間反復動作后才會轉(zhuǎn)變?yōu)樾碌臓顟B(tài)。這種現(xiàn)象被稱為“振蕩”。為了讓大家更容易理解“振蕩”的現(xiàn)象,我們制作了一個簡單易懂的體驗程序(圖4)。請大家也試著體驗一下吧。
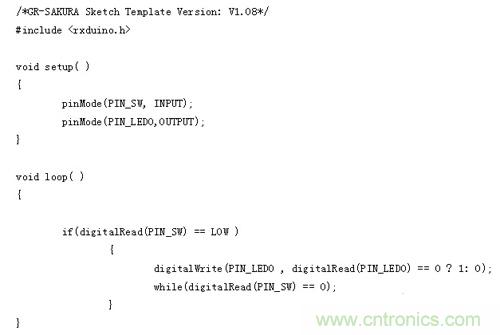
圖4:振蕩體驗程序
試著通過控制開關(guān)反復點亮、熄滅LED來執(zhí)行所期望的動作,怎么樣?是不是有時如你所愿,有時又適得其反?產(chǎn)生這種現(xiàn)象的原因就是因為振蕩。如果將振動過程中的狀態(tài)作為開關(guān)的信號讀取出來,將得不到正確的結(jié)果。因此,需用防振蕩程序來解決。
在圖3的程序中,檢測到開關(guān)最初被按下后先停止50微妙(0.05秒)后再進行處理(圖3中的⑤)。如果不停止,在檢測到開關(guān)被按下時雖然LED也會亮燈,但接下來確認開關(guān)的狀態(tài)時,由于振蕩的原因,有可能會認為是“開關(guān)處于松開的狀態(tài)”(因為輸入暫時還沒返回到HIGH)而導致LED熄滅。因此,如上所述,我們通過在開關(guān)的狀態(tài)穩(wěn)定之前停止處理(50微妙)的方式來解決這個問題。
我們一起學習了GPIO的結(jié)構(gòu)和使用方法。如果將程序中的PIN_LED0的部分換成別的LED號(僅在選0?3時有效),將可以變換閃爍的LED。另外,如果改寫判斷部分的程序,也可以進行諸如“按兩次則LED亮燈,接下來再按1次時熄滅”等復雜的處理。這次的體驗程序只使用了GR-SAKURA上的輸入/輸出設備,但也可將帶有數(shù)字輸出功能的外部傳感器連接到GR-SAKURA的I/O端子上,也可以連接LED以外的設備(如電子蜂鳴器)。
串行通信
單片機與外圍設備的連接:并行和串行
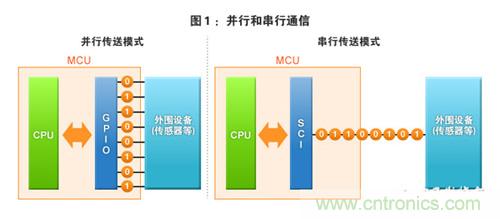
單片機是嵌入式設備的“頭腦”,其與作為嵌入式設備的“手和腳”是各種外圍設備(輸入輸出設備等)連接。單片機應該怎樣與這些外圍設備連接才好呢?比如,我們來考慮一下將傳感器與單片機連接的情況。如果使用本連載第1期中介紹的“GPIO”的話,從傳感器向單片機傳送8位信號時需要使用8個引腳。這種傳送模式被稱為并行(并行通信)模式(圖1―左)。但是,僅一個傳感器就需要連接8個引腳,確實太可惜了,是否還有連接更少的引腳就能達到同樣目的的方法呢?
此時,可使用串行傳送模式(串行通信)。 “串行”的意思就是直列或直線。通過并行傳送模式(Parallerl Transferring Mode)中需要8個引腳才能實現(xiàn)的通信,在串行傳送模式(Serial Transfer Mode)中,由于可以以排成一直線的模式進行傳送,所以僅需一個引腳就夠了(圖1―右)。由于在單片機內(nèi)部是通過并行模式來進行信號交換,所以還需將通過串行模式傳送來的信號轉(zhuǎn)換為并行模式(串行并行轉(zhuǎn)換)。相反,從單片機向與單片機串行連接的外圍設備傳送的信號也需要將信號從并行模式轉(zhuǎn)換為串行模式(并行串行轉(zhuǎn)換)。瑞薩電子的單片機RX63N是通過被稱為SCI(Serial Communication Interface,串行通信接口)的單元進行這些轉(zhuǎn)換的。例如,使一個引腳對應1位 的char型變量進行信息交換的是并行通信(Parallel communication),而一個引腳以時分(time division)按每1位進行信息交換的就是串行通信(Serial Communication)。
由于串行連接僅使用少數(shù)引腳便可進行,所以,近年來多被用于單片機和外圍設備之間的連接。GPIO除了用于將驅(qū)動電機的信號及LED閃爍等軟件操作結(jié)果的信號輸出時以外,還被用于通過開關(guān)或ON/OFF輸出的傳感器的輸入等。
通過UART便可簡單地使用串行通信
由于電特性的不同,以及用于進行通信協(xié)議的規(guī)定不同,串行通信具有多種方式,其中,最易于使用的應該是“異步通信模式”了。僅需用信號線將單片機和外圍設備連接起來便可使用,所以在單片機與動作監(jiān)視器用的終端之間進行通信時、以及單片機與無線LAN用模塊進行通信時使用。
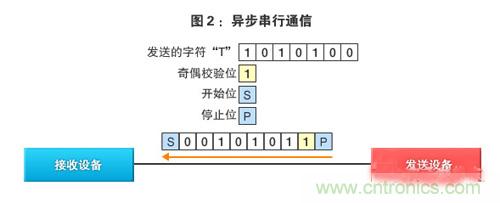
在異步通信模式的串行通信狀態(tài)下,一字節(jié)的文字信息※1在“開始位”(Start bit,意味著開始發(fā)送)和“停止位”(Stop bit,意味著停止發(fā)送)之間發(fā)送(圖2)。由此,無需I2C (Inter-Integrated Circuit,內(nèi)部集成電路)”及“SPI(Serial Peripheral Interface,串行外設接口)”等時鐘信號線(但在其他的串行通信模式中這些時鐘信號線是必需的,以對發(fā)送和接收的時序進行同步)。另外,還可追加用于檢查數(shù)據(jù)是否已正常發(fā)送的“奇偶校驗位(Parity bit)※2”。
此通信方式所使用的通信用器件被稱為UART(Universal Asynchronous Receiver/Transmitter,通用異步收發(fā)器),在瑞薩電子的單片機--RX63N中內(nèi)置了支持此功能的SCI(串行通信接口)。
(※1)異步串行通信狀態(tài)下,一般都是從“最低有效位(LSB: Least Significant Bit),即最低二進制數(shù)位”開始進行發(fā)送的。
(※2)奇偶校驗位(Parity bit):在發(fā)送時按一定量的數(shù)據(jù)(在SCI中為7位或8位)中所具有“1”(或“0”)的個數(shù)為奇數(shù)個時定為“1”,為偶數(shù)個時定為“0”的奇偶校驗位(使偶校驗(Even Parity Check)、數(shù)據(jù)及奇偶校驗位中所包括的“1”的數(shù)量成為偶數(shù)個的方法),并通過與接收側(cè)進行校驗,以檢測出數(shù)據(jù)通信中的錯誤。反之,如果“1”(或“0”)的個數(shù)為奇數(shù)時定為“0”,為偶數(shù)時定為“1”的方法被稱為奇校驗(Odd Parity Check)。
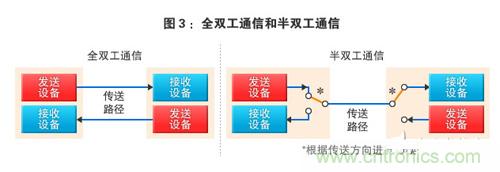
在異步通信中,能實現(xiàn)按“單片機→外圍設備”或“外圍設備→單片機”的方向確保數(shù)據(jù)信號專用的信號線時,被稱為全雙工通信。另一方面,將通過1根信號線來切換通信方向的方式稱為半雙工通信。全雙工方式時需要2根信號線,可同時進行發(fā)送和接收。半雙工方式時僅需1根信號線,但必須在發(fā)送和接收之間進行切換(圖3)。
嘗試向單片機和電腦之間進行通信!
下面,我們通過GR-SAKURA來試用樣本程序。本期我們試著通過可在電腦上運行的終端軟件和GR-SAKURA之間進行通信。也就是試用從終端軟件發(fā)送出“?”(半角問號)后就有“GR-SAKURA”的字符串被傳送回來的程序(圖4)。為了確認該程序的動作狀況,需在電腦上安裝終端軟件。如在Windows系統(tǒng)下可使用免費軟件—TeraTerm,而在Mac系統(tǒng)下建議使用該系統(tǒng)標準配備的軟件—Terminal。
該樣本程序使用了GR-SAKURA的櫻花程序庫“串行通信(Serial Class)”。該程序庫支持全雙工異步通信。
在程序的第8行中,對經(jīng)由USB的通信進行設定。第13行的Serial.read()是用于設定在串行通信中讀取從電腦發(fā)送過來的數(shù)據(jù),在讀取“?”(半角問號)時,就將“GR-SAKURA”字符串傳送回來。如果換作是GR-SAKURA中所搭載的RX63N單片機來進行處理的話,就是:SCI將電腦傳送來的串行信號轉(zhuǎn)換為并行信號,再由CPU對“?”進行識別后判斷輸出“GR-SAKURA”字符串,之后再通過SCI將并行信號轉(zhuǎn)換為串行信號后發(fā)送到電腦上。
雖然只是非常簡單的程序,但是由此便可實現(xiàn)在GR-SAKURA和電腦之間進行文字信息的交換。本期我們介紹的是固定字符串,但也可發(fā)送GR-SAKURA的處理結(jié)果。請大家也作嘗試!
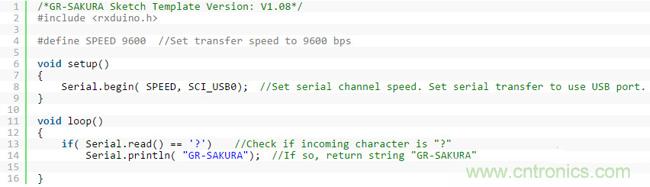
圖4:樣本程序:從Terminal輸入“?”后,將傳送回“GR-SAKURA”的信息。
※//~為注釋符,不會影響程序的運行
※本程序僅用于說明程序的原理,并不具有在實際使用時所需的對策。



