

【導讀】在終端市場上,利用無刷直流電機(簡稱為BLDC)技術取代交流電機或機械泵已經取得了重大進展。為了實現電機的精確控制和高效換向,高分辨率電流和旋轉位置信息至關重要。
相對于交流電機,使用BLDC的優(yōu)點包括:更高的功效和熱效率、體積較小、性能更可靠。此外,由于BLDC利用電子換向來代替?zhèn)鹘y(tǒng)的機械換向,使應用速度范圍變得更容易控制扭矩和速度參數,也可以實現一些更復雜的控制如維持扭矩或速度極限。正是由于這些優(yōu)點,BLDC正在進入越來越多的現有的和新興的應用。
BLDC電機控制中的角度傳感器
為了實現電機的精確控制和高效換向,高分辨率電流和旋轉位置信息至關重要。一般旋轉器的系統(tǒng)設計雖然可達到較高的分辨率和精度,但仍然要考慮實體占用空間大及成本高的問題。無傳感器方案可用于檢測反電動勢電流,還可以降低傳感器重量和成本,但由于無法得到有效的位置數據來產生反電動勢,電機啟動性能可能存在問題。其他解決方案,例如利用三個霍爾效應傳感器來檢測電機磁鐵的位置,通常用于成本敏感的應用中。在這種情況下,雖然實現了分辨率,但必須同時監(jiān)視三組信號。在空間不足的情況下,傳感器的安裝也會成為技術上的挑戰(zhàn),這也是另一種潛在的問題。
另一種方案是使用基于異性磁阻 (Anisotropic Magneto-Resistive,或簡稱AMR)技術的角度傳感器 (Angle Sensor)。 AMR技術是磁感應用的一種,可實現高角度精度,并且可將單個傳感元件與電子電路集成在同一封裝中。從而實現傳感器系統(tǒng)的小型化,并且使得將傳感器定位在電機組件內成為可能。
AMR 與光學傳感技術的比較
與傳統(tǒng)光學傳感技術比較,AMR技術可提供較小巧的外觀、低成本,并且更適合在惡劣環(huán)境下工作,例如骯臟及溫度變化的工作環(huán)境中。表1列舉了兩者之間的比較,從中可以明顯看出在無刷直流電機中使用AMR的優(yōu)點。
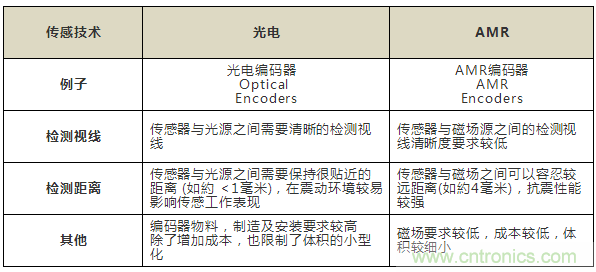
表1:光電和AMR傳感技術的比較
AMR傳感器技術原理
基于AMR原理的傳感器的材料電阻率取決于相對于電流方向的磁化方向。AMR傳感器是在磁飽和狀態(tài)下工作,因此外加的磁場的主導了電阻變化。當外磁場和電流方向平行時,電阻最大;而當施加的電場垂直于載流磁感應合金的平面時,電阻最小。圖1顯示了AMR傳感器工作原理的簡化圖。
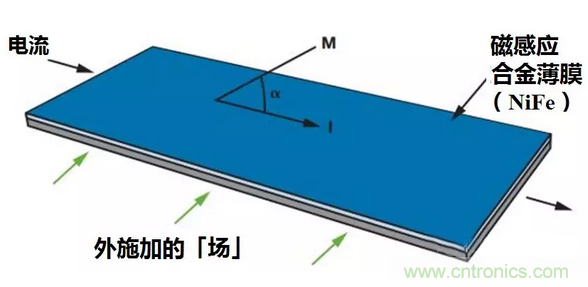
圖1:AMR傳感器的工作原理
AMR傳感器的選擇
為了確保電機轉動的高精準度,在選擇角度傳感器時有以下建議 :
能感應360° 旋轉角,可以準確測量絕對角度位置(Absolute Angular Position);
角度誤差率較低;
擁有線性穩(wěn)定的誤差率,方便讓主微控制器 (Microcontroller) 執(zhí)行偏移校正的計算。
以Analog Devices公司的ADA4571 系列為例,圖2顯示了旋轉磁場施加在360° 機械旋轉情形時ADA4571的典型高輸出電平和角度誤差。經微控制器進行偏移校正后,典型誤差小于0.1°。
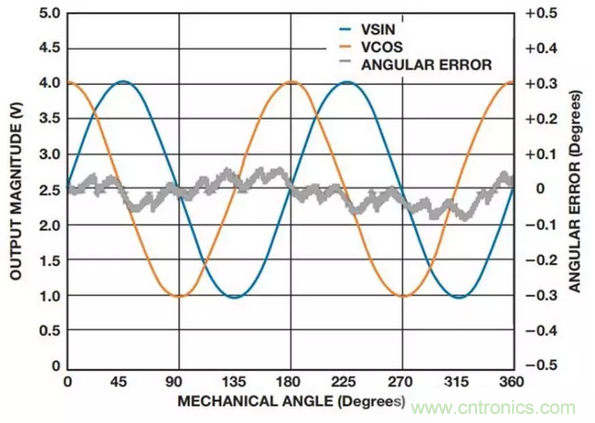
圖2:在360°機械旋轉下的ADA4571誤差(灰色)和輸出波形(橙色/藍色)
角度傳感器的安裝
針對大多數BLDC控制系統(tǒng),根據可用空間大小和電機軸的可接近性,有許多方法來配置和安裝傳感器。以ADA4571作例,如圖3所示是兩個較普遍的安裝配置。
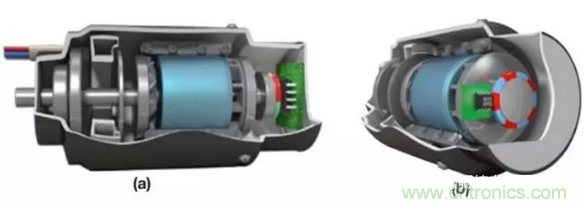
圖3:(a)電機軸端系統(tǒng)配置 (b)電機軸側系統(tǒng)配置
圖3a是典型電機軸端系統(tǒng),在旋轉軸上安裝了一個直徑磁化盤式磁體,讓磁體提供穿過傳感器平面的磁場。在這種配置中,可直接讀取轉子角度,而沒有機械和電氣組件之間的接觸。由于AMR技術不依賴于磁場強度 (Field Strength) ,因此它對于氣隙變化(air-gap variation) 有較大容忍度,使得工程師在對材料的選擇,以及對磁體物料的機械公差要求上,更為靈活。
圖3b 是軸側系統(tǒng),此配置可用于那些待檢測的軸不能在端頭安裝磁體的應用。在這種配置中,磁體提供磁場,傳感器和磁化盤可以安裝在軸上的任何位置,使得有空間限制的應用有多一種選擇。
總結
對于工業(yè)和汽車BLDC電機控制系統(tǒng)的設計人員來說,磁感的角度傳感器提供了一個小巧、堅固且易于組裝的位置傳感解決方案。在選擇角度傳感器時,需要注意以下三個要點:
能感應360° 旋轉角,可以準確測量絕對角度位置(Absolute Angular Position);
角度誤差率較低;
擁有線性穩(wěn)定的誤差率,以便主微控制器 (Microcontroller) 執(zhí)行偏移校正的計算。
在安裝上,角度傳感器也為工程師提供了跟具靈活性的安裝方案,包括“軸端系統(tǒng)”配置及“軸側系統(tǒng)”配置,以應對空間不足的應用場景。
更多有關角度傳感器及BLDC電機控制的技術設計應用內容,可參考:
ADA4571評估板
Benefits of using Brushless DC Motors (BLDC)
How to Power and Control Brushless DC Motors
Smaller, Smoother, Saving Energy: Power and Sensing Advances for Better Motor Control
原創(chuàng):Kevin Chow 得捷電子DigiKey



