

【導讀】之前的文章中,我們聊到了磁鐵的類型以及其如何在同軸模式下與MPS MagAlpha傳感器一起使用。本文將在這里探討另一種“側軸”模式拓撲。MPS MagAlpha傳感器在IC的中心使用了一系列霍爾陣列,該霍爾元件可感應到來自旋轉磁體磁場的水平矢量。這種磁場通常位于傳感器上方或側面的一對徑向磁化的磁極(見圖1)。
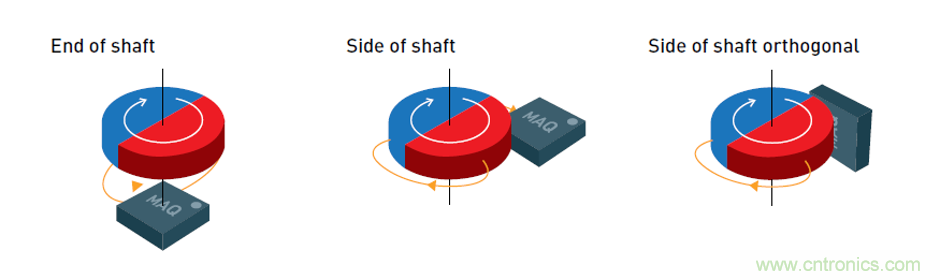
圖 1:MagAlpha 傳感器同軸和側軸模式
側軸拓撲有兩種形式:一種為“標準”側軸模式,其傳感器封裝表面與磁鋼的旋轉軸相互垂直;另一種為“正交”側軸模式,其傳感器封裝表面與磁鋼的旋轉軸平行。與同軸模式相比,這兩種設計過程中都需要更多的考慮,而MPS 磁仿真工具可以提供一種有效的方法,能在進行真正的機械設計之前對方案進行性能評估。
介紹
當將MagAlpha傳感器與旋轉軸一側的磁鐵協(xié)同工作時,霍爾陣列會同時看到徑向磁場分量Br和切向分量Bt(或者在正交側軸的情況下看到垂直分量Bz)。最常見的側軸拓撲結構使用徑向極化的環(huán)形磁鐵(見圖2)。
在這種結構中,徑向場Br的大小通常大于切向分量Bt。當傳感器感應到大小不相等的兩個磁場時,隨著磁鋼的旋轉,角度輸出將變?yōu)榉蔷€性。所以,必須對兩個場的大小進行歸一化,以便傳感器感應到大小恒定的旋轉場矢量。MagAlpha傳感器集成了偏置電流微調(BCT)寄存器,可以平衡兩個磁場的場幅,從而獲得線性角度響應。更多詳細信息,請參考 應用說明 “在側軸貼裝中使用 MagAlpha 傳感器”。
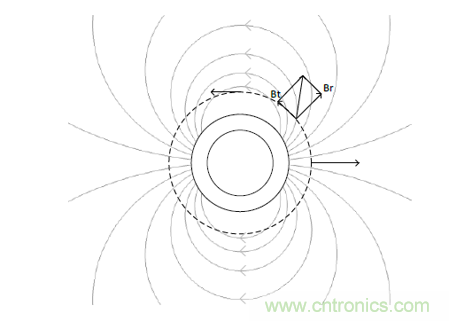
圖 2:徑向極化的兩極環(huán)周圍的徑向和切向磁場
經(jīng)過上述微調之后,由于X軸或Y軸上的感應增益降低,傳感器會感應到較低的合成磁場。在標準側軸拓撲中,由于IC封裝有一定厚度,所以傳感器霍爾陣列也會離磁環(huán)表面比較遠。因此,磁環(huán)設計必須留有足夠的剩磁(常用BR表示),以滿足傳感器的最低磁場要求。由于鐵氧體和塑性鐵氧體磁體在200mT至300mT BR范圍內的剩磁較低,它們無法很好地在側軸模式中工作,尤其是在BCT微調引起的感應增益降低之后。
為了實現(xiàn)充足的磁場強度,磁環(huán)通常必須由具有較高初始剩磁的材料制成,例如燒結(約0.9T至1.4T BR)或鍵合聚合物(約0.6T至0.7T BR)的釹鐵硼(NdFeB)。直徑較大的磁環(huán),采用鍵合的聚合物材料更具成本效益,但與同等尺寸的燒結環(huán)相比,鍵合的聚合物環(huán)的場強約為一半。所以必須調整磁環(huán)的尺寸,才能確保在選定的距離以及BCT調整后滿足傳感器的最低磁場強度的要求。
MagAlpha系列集成了兩個用來優(yōu)化側軸模式的傳感器:MA710和MA310,當磁場強度太低時,這些產品具有更高的內部增益,可適應最低15mT的最小場(大多數(shù)MagAlpha系列通常為30mT至40mT)。
點擊這里,查看上述示例中使用的MagAlpha系列產品磁仿真工具
仿真器工具可以支持MagAlpha系列所有磁鐵類型以及傳感器到磁體的拓撲。它能有效地原型化和評估不同磁鐵和安裝位置的傳感器性能,可避免反復試驗。機械和電磁公差對系統(tǒng)的影響也可以通過工具高級設置選項輸入,以評估對角度分辨率性能的影響。
圖3 顯示了使用結合釹環(huán)的側軸設計示例。環(huán)的內徑為20mm,外徑為30mm,高度為2mm。 在這個示例中,該環(huán)具有簡單的兩極徑向磁化的700mT剩磁。在標準的側軸拓撲中使用MA710傳感器,傳感器組件理想地放置在環(huán)形磁鋼的側面,以使霍爾陣列恰好位于磁鐵高度的一半。MA710 QFN傳感器封裝的標稱高度為0.9mm,內部霍爾陣列位于封裝表面下方0.5mm處。因此可以得到垂直參數(shù)Z為0mm。
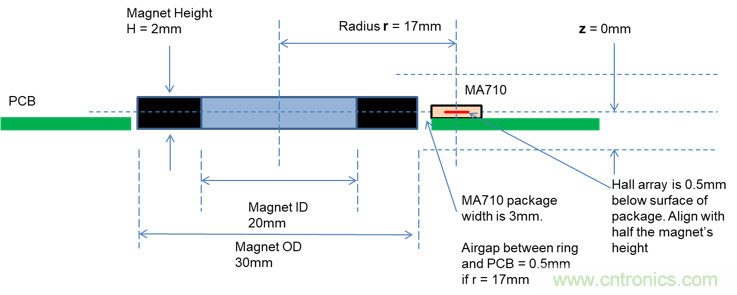
圖 3:標準側軸拓撲MA710角度傳感器
使用仿真器掃描從r = 16.5mm到20mm的距離,傳感器的合適位置應在r = 17mm處(見圖4)。在此位置,傳感器在IC封裝的邊緣與環(huán)形磁鋼表面之間的氣隙為0.5mm(滿足安裝最小誤差),而且正切磁場BT大約為18mT(相對比較大)。徑向磁場Br在大約82mT,比BT大得多,這將導致傳感器輸出角度非線性,需要通過BCT寄存器進行一些校正以減小徑向磁場的幅度。選定r=17mm后,仿真器可以計算出該位置需要的BCT寄存器數(shù)值為200。將此值應用于傳感器,可得到分辨率約為11.3位(3-sigma)的解決方案。
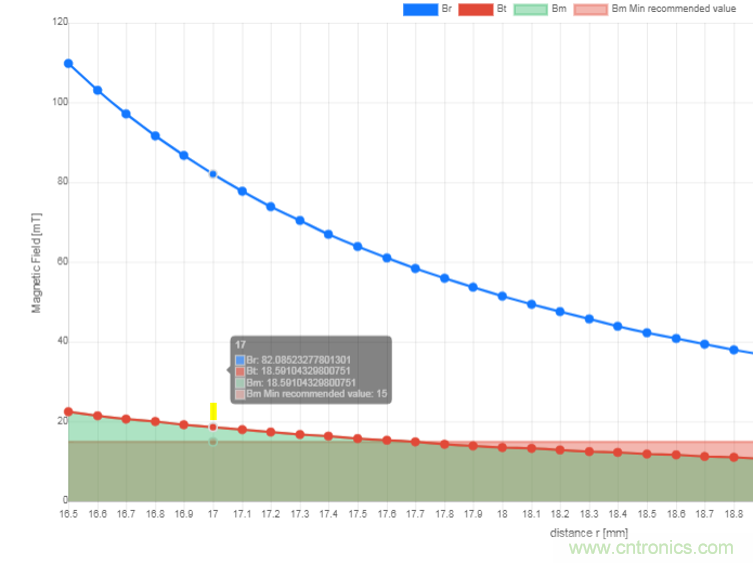
圖 4:標準側軸拓撲中傳感器觀測到的磁場與半徑的仿真器圖
圖5 顯示了仿真器總結報告。
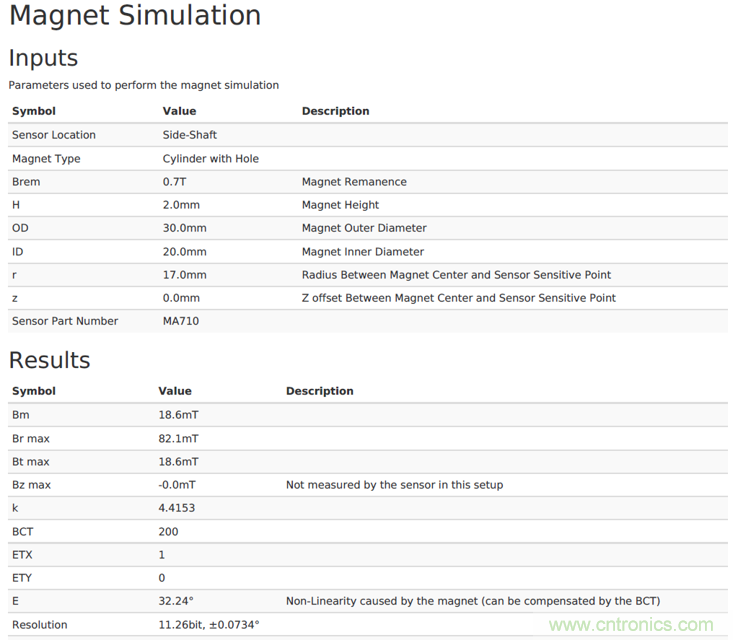
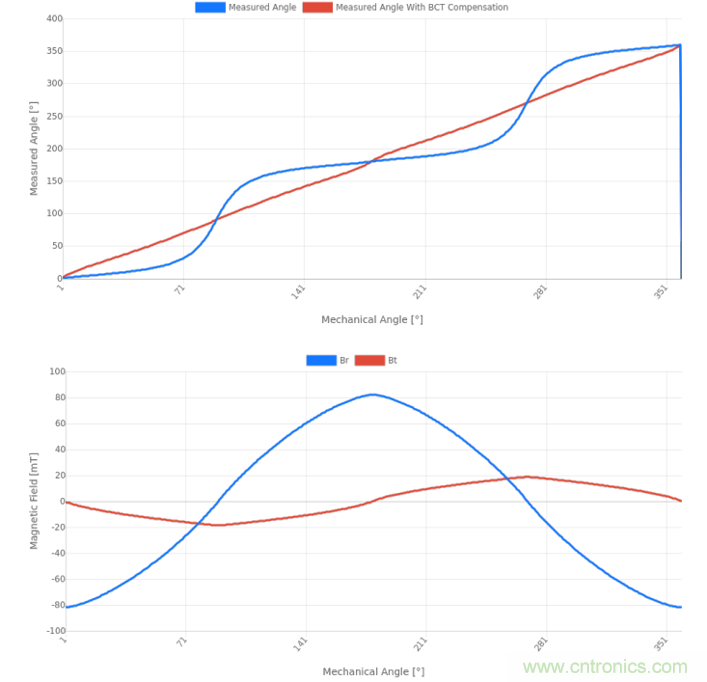
圖 5:磁鋼仿真工具報告
值得注意的是,在側軸模式下,機械公差和磁化公差對傳感器線性度的影響要大得多。因此,必須考慮這些公差以確保符合最終設計期望。使用仿真器進行第一遍查找初始設置后,建議通過高級參數(shù)部分添加各種公差來執(zhí)行一系列進一步的仿真器迭代。有關公差及其影響的討論,請參見應用說明 AN142(“側軸配置中的線性度”)
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯(lián)系小編進行處理。
推薦閱讀:



