

【導(dǎo)讀】這就好比是我們時代的登月計劃。從傳感器到人工智能(AI),經(jīng)典的電子供應(yīng)鏈已經(jīng)形成了一個協(xié)作矩陣,致力于實現(xiàn)自動駕駛車輛的安全性。為此,還需進(jìn)行大量硬件和軟件開發(fā)工作,以確保駕駛員、乘客和行人受到保護(hù)。盡管機(jī)器學(xué)習(xí)和AI可以發(fā)揮作用,但其有效性取決于輸入數(shù)據(jù)的質(zhì)量。因此,除非自動駕駛車輛建立在高性能、高可靠度傳感器信號鏈的基礎(chǔ)上,始終提供最準(zhǔn)確的數(shù)據(jù)作為生死決策的依據(jù),否則便不能被認(rèn)為是安全的。
就像最初的登月一樣,在通往安全自動駕駛車輛的道路上還存在許多障礙。最近發(fā)生的涉及自動駕駛車輛的事故助長了唱反調(diào)者的聲勢,他們認(rèn)為車輛及其行駛環(huán)境太復(fù)雜,變數(shù)太多,而算法和軟件仍然錯誤太多。對于參與了ISO26262功能安全合規(guī)性驗證的任何人來說,他們對此持懷疑態(tài)度是可以理解的。這種懷疑態(tài)度有相關(guān)數(shù)據(jù)的支持,下圖比較了2017年在硅谷測試的五家自動駕駛車輛公司的實際行駛里程數(shù)和脫離自動駕駛模式的次數(shù)(圖1)。2019年的數(shù)據(jù)尚未匯總,但個別公司的報告可在網(wǎng)上查閱。
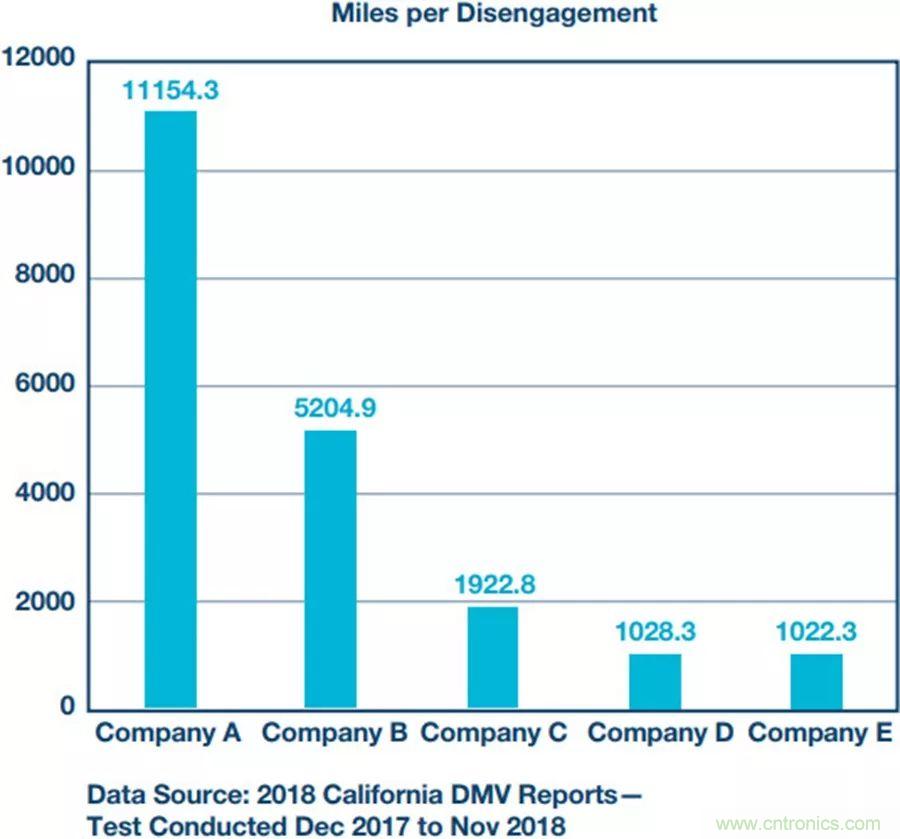
圖1. 五大自動駕駛制造商在加州的測試數(shù)據(jù):每次脫離人為接管后自動駕駛系統(tǒng)的平均行駛英里數(shù)(2017年12月至2018年10月)。在這段時間內(nèi),總共有28家公司主動在在加州的公眾場合對車輛進(jìn)行了測試。期間,在自動駕駛模式下共行駛2,036,296英里,發(fā)生143,720次人為接管。
但是目標(biāo)已經(jīng)很明確,當(dāng)務(wù)之急是要在自動駕駛即將到來之時,保障至關(guān)重要的安全性。加州車輛管理局(DMV)2018年的非官方數(shù)據(jù)顯示,同等英里數(shù)下,自動駕駛模式的人為接管次數(shù)正在減少,這也表明自動駕駛系統(tǒng)正變得越來越強(qiáng)大。而這種趨勢需要進(jìn)一步加快。
通過將協(xié)作和新思維放在第一位,汽車制造商將直接與芯片供應(yīng)商洽談;傳感器制造商將與AI算法開發(fā)人員討論傳感器融合;而軟件開發(fā)人員將與硬件提供商建立聯(lián)系,充分發(fā)揮兩者的優(yōu)勢。舊的關(guān)系正在改變,新的關(guān)系正在動態(tài)地形成,以優(yōu)化最終設(shè)計的性能、功能、可靠性、成本和安全性。
生態(tài)系統(tǒng)正在尋求合適的模式,以便在此基礎(chǔ)上制造和測試全自動駕駛車輛,用于快速涌現(xiàn)的新應(yīng)用,如自動駕駛出租車(robo-taxi)和長途貨車。在此過程中,高級駕駛輔助系統(tǒng)(ADAS)所使用的傳感器不斷改進(jìn),使得自動化程度快速提高。
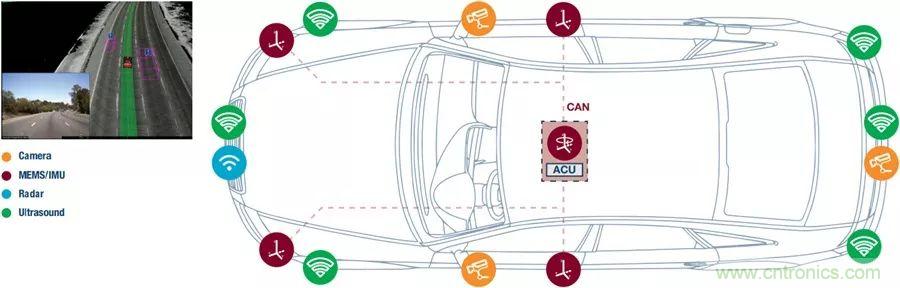
圖2. 用于ADAS感知和車輛導(dǎo)航的各種傳感技術(shù)往往獨立工作,并向駕駛員發(fā)出預(yù)警,以便做出反應(yīng)。
這些傳感器技術(shù)包括攝像頭、激光探測與測距(LiDAR)、無線電探測與測距(radar)、微機(jī)電傳感器(MEMS)、慣性測量單元(IMU)、超聲波和GPS,所有這些都為人工智能系統(tǒng)提供關(guān)鍵的數(shù)據(jù)輸入,從而驅(qū)動真正的自動駕駛車輛。
車輛的認(rèn)知能力是預(yù)測性安全的基石
車輛的智能化程度通常用自動駕駛級別來表示。L1和L2主要是預(yù)警系統(tǒng),而L3或更高級別的車輛被授權(quán)控制以避免事故。隨著車輛發(fā)展到L5,方向盤將被取消,車輛完全自動駕駛。
在最初的幾代系統(tǒng)中,隨著車輛開始具備L2功能,各個傳感器系統(tǒng)獨立工作。這些預(yù)警系統(tǒng)誤報率較高,帶來了不少麻煩,因此經(jīng)常被關(guān)閉。
為了實現(xiàn)具有認(rèn)知能力的全自動駕駛車輛,傳感器的數(shù)量將顯著增加。此外,性能和響應(yīng)速度也必須大幅提升(圖3、圖4)。
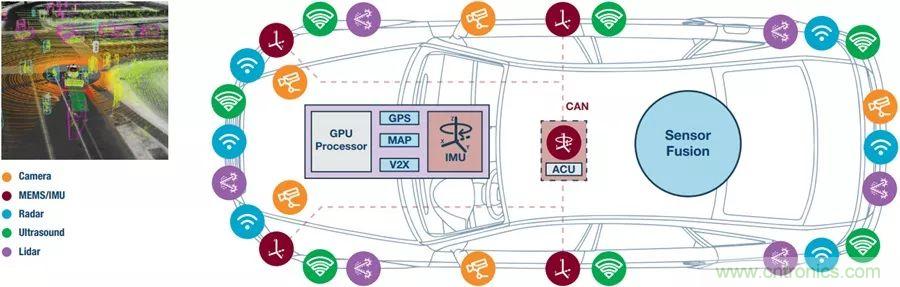
圖3. 為了確保自動駕駛車輛的安全,必須充分探測當(dāng)前和歷史狀態(tài)、環(huán)境特性以及車輛自身狀態(tài)(位置、速度、軌跡和機(jī)械狀況)。
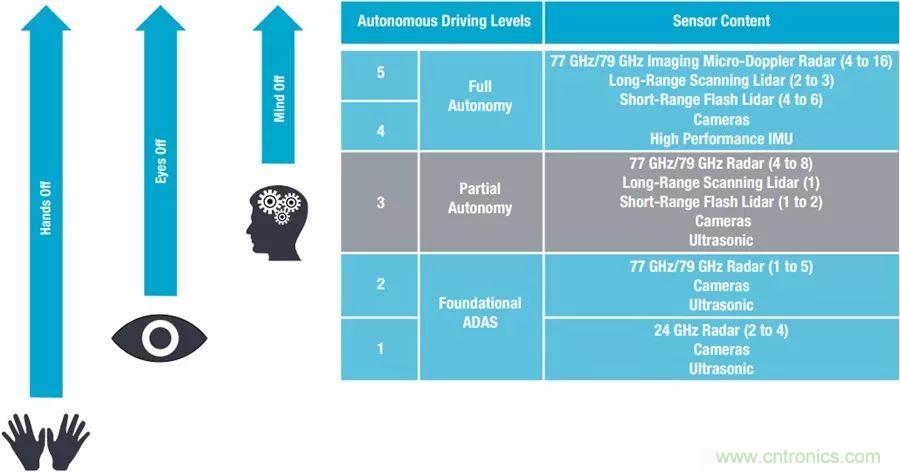
圖4. 自動駕駛等級和傳感器要求。
將更多傳感器安裝在車輛上后,還可以更好地監(jiān)控和分析當(dāng)前機(jī)械狀況,如胎壓、重量變化(例如,負(fù)載和無負(fù)載、一名乘客或五名乘客),以及可能影響制動和操控的其他磨損因素。有了更多的外部傳感方式,車輛可以更充分地感知其行駛狀況和周圍環(huán)境。
傳感方式的改進(jìn)使汽車能夠識別環(huán)境的當(dāng)前狀態(tài),并了解歷史狀態(tài)。這來自于ENSCO航空航天科學(xué)和工程部首席技術(shù)官Joseph Motola開發(fā)的原理。這種傳感能力既可以完成一些簡單的任務(wù),例如探查道路狀況,識別坑洼位置,也可以進(jìn)行一些詳細(xì)分析,比如一段時間內(nèi)在特定區(qū)域發(fā)生的事故類型以及事故原因。
在產(chǎn)生這些認(rèn)知概念時,由于感測、處理、內(nèi)存容量和網(wǎng)絡(luò)連接的限制,使它們看起來似乎遙不可及。但現(xiàn)在情況已經(jīng)大有改觀。現(xiàn)在,系統(tǒng)可以訪問這些歷史數(shù)據(jù),并將其與車輛傳感器提供的實時數(shù)據(jù)相結(jié)合,以提供越來越準(zhǔn)確的預(yù)防性措施,避免發(fā)生事故。
例如,IMU可以檢測到因坑洼或障礙物引起的突然躍起或偏離。過去,這些信息無處傳輸,但現(xiàn)在通過實時連接,可將這些數(shù)據(jù)發(fā)送到中央數(shù)據(jù)庫,并用于警告其他車輛有關(guān)坑洼或障礙物的信息。攝像頭、雷達(dá)、激光雷達(dá)和其他傳感器數(shù)據(jù)也是如此。
這些數(shù)據(jù)經(jīng)過編譯、分析和融合,使車輛能夠利用這些數(shù)據(jù)對其行駛環(huán)境作出預(yù)判。這使車輛能夠成為一臺有學(xué)習(xí)能力的機(jī)器,有望做出比人類更好、更安全的決策。
多方面決策和分析
在提高車輛感知方面,現(xiàn)已取得了很大的進(jìn)展。重點在于從各個傳感器收集數(shù)據(jù),并應(yīng)用傳感器融合策略,將互補優(yōu)勢發(fā)揮到極致,彌補不同傳感器在各種條件下各自的弱點(圖5)。
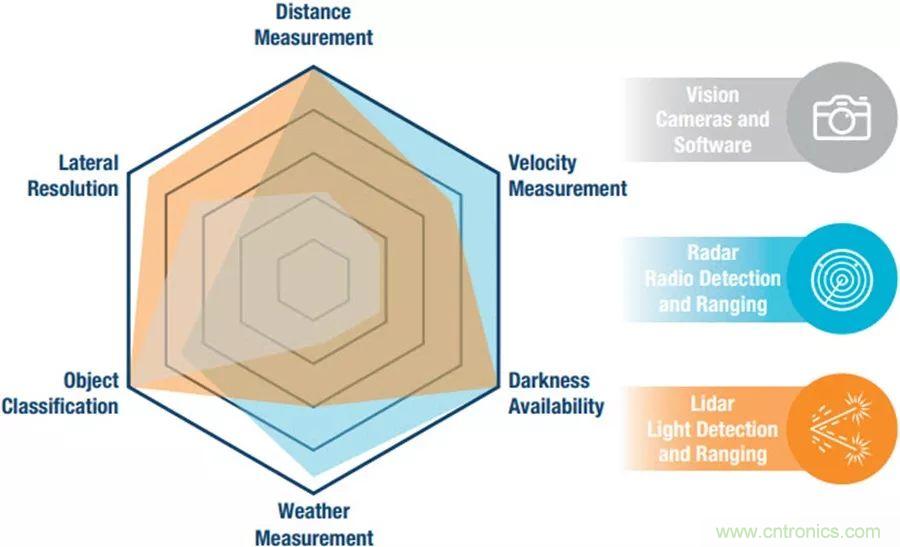
圖5. 每一種傳感技術(shù)都有其各自的優(yōu)缺點,但只要有適當(dāng)?shù)膫鞲衅魅诤喜呗?,它們就可以?yōu)勢互補并彌補弱點。
不過,要想真正有效地解決行業(yè)面臨的問題,仍有許多工作要做。例如,要提高攝像頭計算橫向速度的能力(也就是物體在與車輛行駛方向垂直的路徑上移動的速度)。但是,要實現(xiàn)足夠低的誤報率,即使是最好的機(jī)器學(xué)習(xí)算法仍然需要大約300毫秒來進(jìn)行橫向移動檢測。對于在以每小時60英里速度行駛的車 輛和在車輛前方行走的行人來說,毫秒之差就關(guān)系到人員受傷的輕重程度,因此響應(yīng)時間至關(guān)重要
300毫秒延遲是由系統(tǒng)從連續(xù)視頻幀執(zhí)行增量矢量計算所需的時間造成的。要進(jìn)行可靠的檢測,需要十個或以上連續(xù)幀,但我們必須將其降到一個或兩個連續(xù)幀,以便給車輛足夠的響應(yīng)時間。雷達(dá)可以做到這一點。
同樣,雷達(dá)在速度和物體探測方面也有許多優(yōu)點,例如對方位和俯仰角的高分辨率,以及“看到”周圍物體的能力,但它也需要為車輛提供更多的時間來作出反應(yīng)。以400公里/小時或更高的速度測定為目標(biāo),77GHz至79GHz的一些開發(fā)工作取得了新的進(jìn)展。這種水平速度測定可能看起來很極端,但對于支持復(fù) 雜的雙向車道行駛是必要的,在這種路況中,相向行駛的車輛的相對速度超過200公里/小時。
激光雷達(dá)可以彌補攝像頭和一般雷達(dá)的不足,是具有認(rèn)知能力的全自動駕駛車輛上一個必不可少的組件(圖6)。但它也面臨著挑戰(zhàn)。
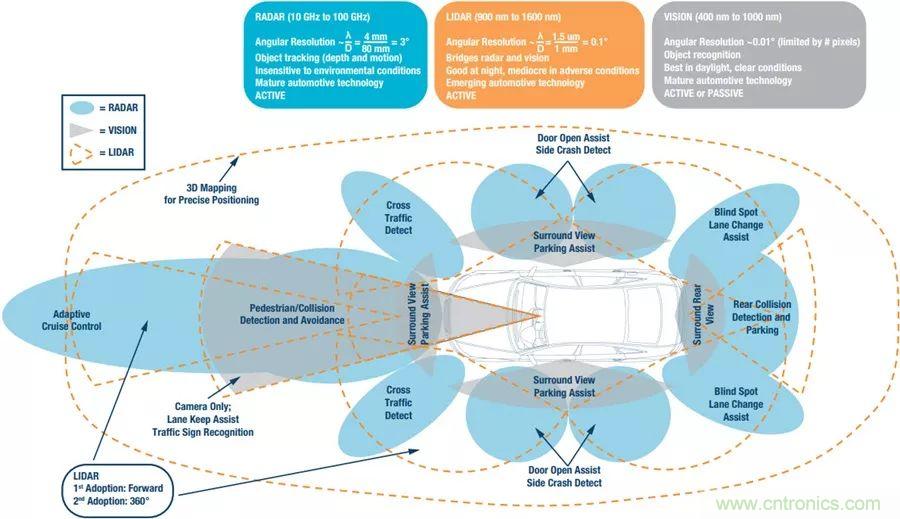
圖6. 全自動駕駛車輛主要依賴360?檢測,需要使用先進(jìn)的雷達(dá)、激光雷達(dá)、攝像頭、慣性測量單元和超聲波傳感器
激光雷達(dá)正在發(fā)展為經(jīng)濟(jì)高效的緊湊型固態(tài)設(shè)計,可以放置在車輛周邊的多個位置,以支持完整的360?覆蓋范圍。它與一般雷達(dá)和攝像頭系統(tǒng)相輔相成,提升了角分辨率和深度感知,以提供更精確的三維環(huán)境影像。
但是,近紅外波段(IR)(850nm至940nm)對視網(wǎng)膜有害,因此其能量輸出在905nm處被嚴(yán)格調(diào)節(jié)到200nJ/脈沖。而通過遷移到波長超過1500nm的短波紅外,這些光由眼睛的整個表面吸收。這樣就可以放寬一些限制,調(diào)節(jié)到每脈沖8 mJ。1500nm脈沖激光雷達(dá)系統(tǒng)的能量級別是905nm激光雷達(dá)的40,000倍,探測距離是后者的4倍。此外,1500nm系統(tǒng)可以更好地抵御某些環(huán)境條件,如霧霾、灰塵和細(xì)小的氣溶膠。
1500nm激光雷達(dá)面臨的挑戰(zhàn)是系統(tǒng)成本,這在很大程度上受到光伏探測器技術(shù)的推動(該技術(shù)如今基于InGaAs技術(shù))。獲得高質(zhì)量解決方案,即具有高靈敏度、低暗電流和低電容,將是1500nm激光雷達(dá)取得進(jìn)展的關(guān)鍵技術(shù)。此外,隨著激光雷達(dá)系統(tǒng)進(jìn)入第二代和第三代,需要使用針對應(yīng)用而優(yōu)化的電路集成,以減少尺寸、功率和整體系統(tǒng)成本。
除了超聲波、攝像頭、雷達(dá)和激光雷達(dá)之外,其他傳感技術(shù)也在實現(xiàn)全自動駕駛方面發(fā)揮著關(guān)鍵作用。GPS讓車輛能夠始終了解自己所處的位置。盡管如此,仍有一些地方無法獲得GPS信號,例如隧道和高層建筑中。而這就是慣性測量單元發(fā)揮重要作用的地方。
盡管經(jīng)常被忽視,但I(xiàn)MU非常穩(wěn)定可靠,因為它依賴于重力,而重力幾乎不受環(huán)境條件影響。它對航位推算非常有用。在暫時沒有GPS信號的情況下,航位推算可使用來自速度計和IMU等來源的數(shù)據(jù),檢測行駛的距離和方向,并將這些數(shù)據(jù)疊加到高清地圖上。這使自動駕駛車輛能夠保持在正確的軌跡,直到GPS信號恢復(fù)。
高質(zhì)量數(shù)據(jù)可節(jié)約時間,挽救生命
和這些傳感技術(shù)一樣重要的是它們的可靠性,如果傳感器本身不可靠,輸出的信號沒有被準(zhǔn)確捕獲以作為高精度數(shù)據(jù)提供給上游,那么這些關(guān)鍵的傳感器將變得毫無意義,也正應(yīng)驗了那句話,“如果輸入的是垃圾,那么輸出的也一定是垃圾”。
為了確保傳感器的可靠性,即使是最先進(jìn)的模擬信號鏈也必須不斷改進(jìn),以檢測、獲取和數(shù)字化轉(zhuǎn)換傳感器信號,使其準(zhǔn)確度和精度不會隨時間和溫度的變化而發(fā)生偏差。采用合適的器件和設(shè)計方法,可以大幅緩解一些出了名的難題(如偏置溫漂、相位噪聲、干擾和其他不穩(wěn)定現(xiàn)象)。高精度/高質(zhì)量的數(shù)據(jù)是機(jī)器學(xué)習(xí)和人工智能處理器得到適當(dāng)訓(xùn)練并做出正確決策的基礎(chǔ)。一般不會有第二次機(jī)會讓你重頭來過。
一旦數(shù)據(jù)質(zhì)量得到保證,各種傳感器融合方法和人工智能算法就可以做出最佳響應(yīng)。事實上,不管人工智能算法訓(xùn)練得有多好,一旦模型被編譯并部署到網(wǎng)絡(luò)邊緣的設(shè)備上,它們的有效性就完全依賴于高精度的傳感器可靠數(shù)據(jù)。
傳感器模式、傳感器融合、信號處理和人工智能之間的這種相互作用,對具有智能和認(rèn)知能力的自動駕駛車輛的發(fā)展,以及保障駕駛員、乘客和行人安全都有著深遠(yuǎn)的影響。但是,如果沒有高度可靠、準(zhǔn)確、高精度的傳感器信息(這些信息是安全自動駕駛車輛的基礎(chǔ)),一切都毫無意義。
和任何先進(jìn)技術(shù)一樣,我們在這方面做的工作越多,就會發(fā)現(xiàn)更多需要解決的復(fù)雜用例。這種復(fù)雜性將繼續(xù)對現(xiàn)有技術(shù)構(gòu)成難題,因此我們期待下一代傳感器和傳感器融合算法可以解決這些問題。
就像最初的登月一樣,我們對于整個自動駕駛車輛推行計劃也抱有巨大的期待,希望這將為社會帶來深刻的變革和持久的影響。從輔助駕駛發(fā)展到自動駕駛,不僅會大幅提升交通安全性,還會顯著提高生產(chǎn)力。而這樣的未來完全依托于傳感器,其他一切都將建立在傳感器基礎(chǔ)之上。
過去25年來,ADI一直致力于汽車安全和ADAS發(fā)展?,F(xiàn)在,ADI正在為自動駕駛的未來奠定基礎(chǔ)。ADI圍繞慣性導(dǎo)航、高性能雷達(dá)和激光雷達(dá)等領(lǐng)域的卓越積累,提供高性能傳感器和信號/功率鏈解決方案。這些解決方案不僅將大幅提高這些系統(tǒng)的性能,而且還將降低整個平臺的實施成本,從而加快我們邁向自動駕駛的步伐。
推薦閱讀:



