

【導(dǎo)讀】MEMS加速度計(jì)終于達(dá)到了能夠測(cè)量廣泛機(jī)器平臺(tái)振動(dòng)的階段。其最近的能力進(jìn)步,加上MEMS加速度計(jì)已有的相對(duì)于傳統(tǒng)振動(dòng)傳感器的諸多優(yōu)勢(shì)(尺寸、重量、成本、抗沖擊性、易用性),促使一類新興的狀態(tài)監(jiān)控(CBM)系統(tǒng)開始使用MEMS加速度計(jì)。
結(jié)果,許多CBM系統(tǒng)架構(gòu)師、開發(fā)者甚至其客戶首次考慮使用此類傳感器。他們面臨的問(wèn)題常常是如何快速了解評(píng)估MEMS加速度計(jì)功能的方法,以便在其機(jī)器平臺(tái)上測(cè)量最重要的振動(dòng)特性。這初看起來(lái)似乎很困難,因?yàn)镸EMS加速度計(jì)數(shù)據(jù)手冊(cè)表述最重要性能特性的方式常常不是開發(fā)人員所熟悉的。例如,許多人熟悉用線速度(mm/s)來(lái)量化振動(dòng),但大多數(shù)MEMS加速度計(jì)數(shù)據(jù)手冊(cè)是用基于重力的加速度(g)來(lái)表達(dá)其性能指標(biāo)。幸運(yùn)的是,有一些簡(jiǎn)單的技術(shù)可用來(lái)將加速度轉(zhuǎn)換為速度,以及估計(jì)加速度計(jì)關(guān)鍵特性(頻率響應(yīng)、測(cè)量范圍、噪聲密度)對(duì)重要系統(tǒng)級(jí)標(biāo)準(zhǔn)(帶寬、平坦度、峰值振動(dòng)、分辨率)的影響。
基本振動(dòng)特性
先從慣性運(yùn)動(dòng)角度考察線性振動(dòng)。在此背景下,振動(dòng)是平均位移為零的機(jī)械振蕩。對(duì)于那些不希望其機(jī)器穿越整個(gè)車間的人來(lái)說(shuō),零平均位移非常重要!振動(dòng)檢測(cè)節(jié)點(diǎn)中核心傳感器的價(jià)值與它反映機(jī)器振動(dòng)最重要特性的能力高低直接相關(guān)。要評(píng)估特定MEMS加速度計(jì)在這方面的能力,首先必須從慣性運(yùn)動(dòng)角度對(duì)振動(dòng)有一個(gè)基本了解。圖1是振動(dòng)情況的物理示意圖,灰色部分表示中點(diǎn),藍(lán)色部分表示一個(gè)方向的峰值位移,紅色部分表示另一方向的峰值位移。等式1提供了一個(gè)描述矩形物體瞬時(shí)加速度的數(shù)學(xué)模型,其振動(dòng)頻率為(fV),幅度為Arms。
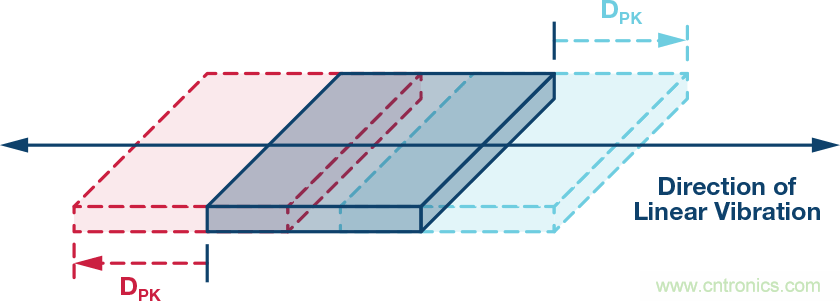
圖1.簡(jiǎn)單線性振動(dòng)

在大部分CBM應(yīng)用中,機(jī)器平臺(tái)的振動(dòng)常常有比等式1所示模型更復(fù)雜的頻譜特征,但此模型為學(xué)習(xí)發(fā)現(xiàn)之旅提供了一個(gè)很好的出發(fā)點(diǎn),因?yàn)樗o出了CBM系統(tǒng)常常會(huì)跟蹤的兩個(gè)常見振動(dòng)特性:幅度和頻率。此方法對(duì)關(guān)鍵特性到線性速度項(xiàng)的轉(zhuǎn)換也很有用(稍后將有更多說(shuō)明)。圖2提供了兩類不同振動(dòng)模式的頻譜視圖。第一類(參見圖2中的藍(lán)線)在其頻率范圍(f1到f6)內(nèi)具有恒定幅度。第二類(參見圖2中的紅線)在四個(gè)不同頻率處出現(xiàn)了峰值幅度:f2, f3, f4, 和 f5.
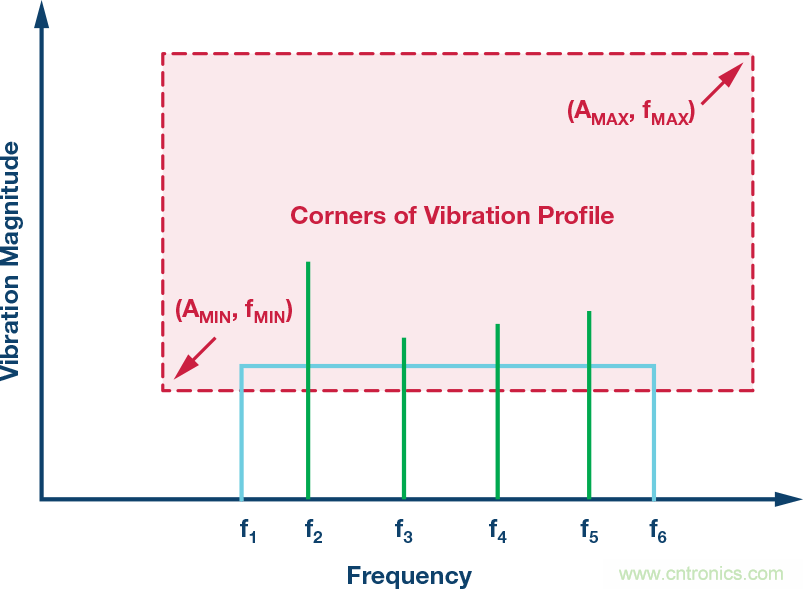
圖2.CM振動(dòng)模式示例
系統(tǒng)要求
測(cè)量范圍、頻率范圍(帶寬)和分辨率是用來(lái)量化振動(dòng)檢測(cè)節(jié)點(diǎn)能力的三個(gè)常見特性。圖2通過(guò)虛線矩形框顯示了這些特性,其邊界分別對(duì)應(yīng)最低頻率(fMIN)、最高頻率(fMAX)、最小幅度(AMIN)和最大幅度(AMAX)。當(dāng)考慮將MEMS加速度計(jì)用作振動(dòng)檢測(cè)節(jié)點(diǎn)中的核心傳感器時(shí),系統(tǒng)架構(gòu)師很可能想在設(shè)計(jì)早期分析其頻率響應(yīng)、測(cè)量范圍和噪聲行為。有一些簡(jiǎn)單的技術(shù)可用來(lái)評(píng)估加速度計(jì)的各種特性,進(jìn)而預(yù)判其是否滿足指定的一組要求。很顯然,系統(tǒng)架構(gòu)師最終必須通過(guò)實(shí)際驗(yàn)證和鑒定來(lái)核驗(yàn)上述估計(jì),但由對(duì)加速度計(jì)能力的早期分析和預(yù)測(cè)所得來(lái)的期望對(duì)這些工作是有價(jià)值的。
頻率響應(yīng)
圖2提供了一個(gè)簡(jiǎn)單的一階模型,其描述了時(shí)域中MEMS加速度計(jì)對(duì)線性加速度(a)的響應(yīng)(y)。在該關(guān)系中,偏置(b)表示傳感器無(wú)振動(dòng)時(shí)的輸出值。比例因子(KA)表示MEMS加速度計(jì)響應(yīng)(y)相對(duì)于線性加速度(a)變化的改變量。
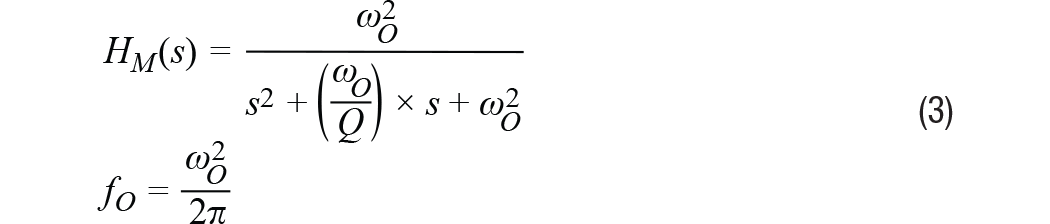
傳感器的頻率響應(yīng)描述比例因子(KA)相對(duì)于頻率的值。在MEMS加速度計(jì)中,頻率響應(yīng)主要有兩個(gè)貢獻(xiàn)因素:(1) 其機(jī)械結(jié)構(gòu)的響應(yīng);(2) 其信號(hào)鏈中的濾波響應(yīng)。等式3提供了一個(gè)通用二階模型,其近似描述了MEMS加速度計(jì)機(jī)械部分對(duì)頻率的響應(yīng)。在該模型中,fO表示諧振頻率,Q表示品質(zhì)因數(shù)。
信號(hào)鏈的貢獻(xiàn)常常取決于應(yīng)用所需的濾波。某些MEMS加速度計(jì)使用單極點(diǎn)低通濾波器來(lái)幫助降低諧振頻率時(shí)的響應(yīng)增益。等式4為此類濾波器相關(guān)的頻率響應(yīng)(HSC)提供了一個(gè)通用模型。在該類濾波器模型中,截止頻率(fC)表示輸出信號(hào)幅度比輸入信號(hào)低√2倍時(shí)的頻率。

等式5將機(jī)械結(jié)構(gòu)(HM)和信號(hào)鏈(HSC)的貢獻(xiàn)進(jìn)行了合并。

圖3直接應(yīng)用此模型來(lái)預(yù)測(cè)ADXL356(x軸)的頻率響應(yīng)。此模型假設(shè)標(biāo)稱諧振頻率為5500 Hz,Q為17,使用截止頻為1500 Hz的單極點(diǎn)低通濾波器。注意,等式5和等式4僅描述了傳感器的響應(yīng)。此模型未考慮加速度計(jì)與其監(jiān)控的平臺(tái)的耦合方式。
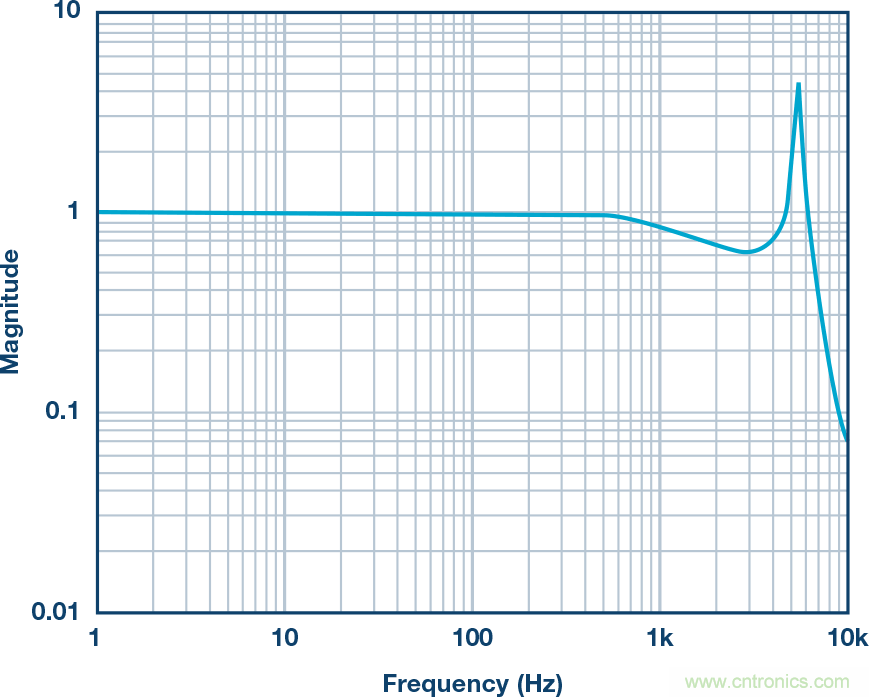
圖3.ADXL356頻率響應(yīng)
帶寬與平坦度的關(guān)系
在利用單極點(diǎn)低通濾波器(例如等式4所用)建立頻率響應(yīng)的信號(hào)鏈中,其帶寬規(guī)格常常說(shuō)明了其輸出信號(hào)提供輸入信號(hào)50%功率時(shí)的頻率。對(duì)于更復(fù)雜的響應(yīng),例如等式5和等式3中的三階模型,帶寬規(guī)格常常帶有相應(yīng)的平坦度規(guī)格。平坦度特性描述比率因子在頻率范圍(帶寬)內(nèi)的變化。利用圖3和圖5中的ADXL356仿真,1000 Hz時(shí)的平坦度約為17%,2000 Hz時(shí)的平坦度約為40%。
雖然許多應(yīng)用由于平坦度(精度)要求而需要限制可以使用的帶寬,但對(duì)有些應(yīng)用來(lái)說(shuō),這可能不是問(wèn)題。例如,某些應(yīng)用可能更注重跟蹤隨時(shí)間的相對(duì)變化,而不是絕對(duì)精度。另一個(gè)例子是利用數(shù)字后處理技術(shù)來(lái)消除用戶最關(guān)心的頻率范圍上的紋波。對(duì)于此類情況,在給定頻率范圍時(shí),響應(yīng)的可重復(fù)性和穩(wěn)定性常常比響應(yīng)的平坦度更重要。
測(cè)量范圍
MEMS加速度計(jì)的測(cè)量范圍指標(biāo)表示傳感器的輸出信號(hào)可以跟蹤的最大線性加速度。在超出額定測(cè)量范圍的線性加速度水平,傳感器的輸出信號(hào)會(huì)飽和。這種情況會(huì)引起嚴(yán)重失真,導(dǎo)致難以(甚至無(wú)法)從測(cè)量結(jié)果提取有用信息。因此,必須確保MEMS加速度計(jì)能夠支持峰值加速度水平(參見圖2中的AMAX)。
注意,測(cè)量范圍與頻率有一定的關(guān)系,因?yàn)閭鞲衅鞯臋C(jī)械響應(yīng)會(huì)引入某種響應(yīng)增益,增益響應(yīng)的峰值出現(xiàn)在諧振頻率時(shí)。對(duì)于ADXL356的仿真響應(yīng)(參見圖3),增益峰值約為4倍,故測(cè)量范圍從±40 g降至±10 g。等式6提供了一種分析方法來(lái)預(yù)測(cè)此值,它以等式5為出發(fā)點(diǎn):
比例因子的大幅變化和測(cè)量范圍的降低,是大多數(shù)CBM系統(tǒng)希望將其遭受的最大振動(dòng)頻率限制在遠(yuǎn)低于傳感器諧振頻率水平的兩個(gè)原因。
分辨率
儀器分辨率可定義為環(huán)境中引起儀器示數(shù)發(fā)生可檢測(cè)變化的最小值。"1在振動(dòng)檢測(cè)節(jié)點(diǎn)中,加速度測(cè)量的噪聲會(huì)直接影響其檢測(cè)振動(dòng)變化的能力(即"分辨率")。因此,對(duì)于那些正在考慮利用MEMS加速度計(jì)檢測(cè)其機(jī)器平臺(tái)上微小振動(dòng)變化的人來(lái)說(shuō),噪聲行為是一個(gè)重要考慮因素。等式7提供了一個(gè)用于量化MEMS加速度計(jì)噪聲對(duì)其分辨微小振動(dòng)變化能力的影響的簡(jiǎn)單關(guān)系式。在該模型中,傳感器的輸出信號(hào)(yM)等于其噪聲(aN)與其經(jīng)受的振動(dòng)(aV)之和。因?yàn)樵肼?aN)與振動(dòng)(aV)沒(méi)有相關(guān)性,所以傳感器輸出信號(hào)的幅度(|yM|)等于噪聲幅度(|aN|)與振動(dòng)幅度(|aV|)的和方根(RSS)。
那么,需要何種振動(dòng)水平才能克服測(cè)量中的噪聲負(fù)擔(dān),在傳感器輸出信號(hào)中產(chǎn)生可觀測(cè)的響應(yīng)?根據(jù)噪聲水平量化振動(dòng)水平有助于以分析方式探究這個(gè)問(wèn)題。等式8通過(guò)比率(KVN)確定了這一關(guān)系,然后根據(jù)該比率導(dǎo)出了一個(gè)預(yù)測(cè)傳感器輸出變化水平的關(guān)系:
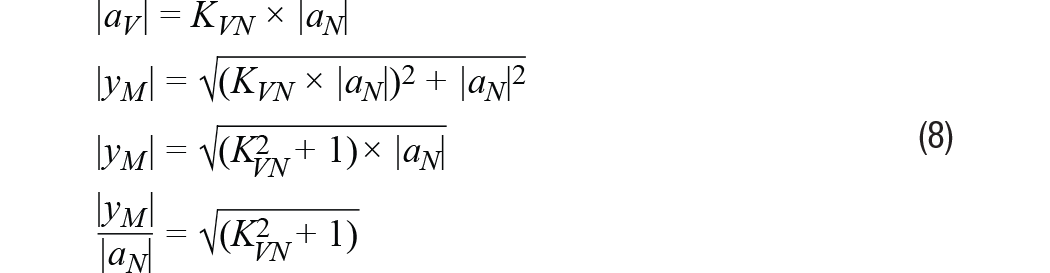
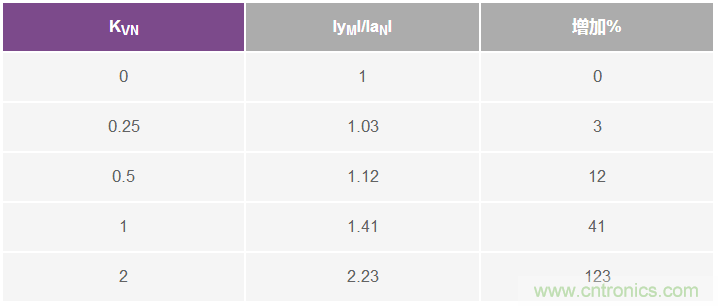
表1提供了此關(guān)系的一些數(shù)值例子,以幫助說(shuō)明傳感器輸出測(cè)量結(jié)果相對(duì)于振動(dòng)與噪聲幅度之比(KVN)的增加。為簡(jiǎn)明起見,本文剩余部分假設(shè)傳感器測(cè)量的總噪聲決定其分辨率。從表1可知,這對(duì)應(yīng)于KVN為1的情況,即振動(dòng)幅度等于噪聲幅度。在這種情況下,傳感器的輸出幅度相對(duì)于零振動(dòng)時(shí)的輸出幅度會(huì)增加42%。注意,為了確定該情況下分辨率的相關(guān)定義,每種應(yīng)用可能需要考慮系統(tǒng)中可觀測(cè)到何種水平的增加。
Table 1. Sensors Response to Vibration/Noise
預(yù)測(cè)傳感器噪聲
圖4顯示了一個(gè)采用MEMS加速度計(jì)的振動(dòng)檢測(cè)節(jié)點(diǎn)的簡(jiǎn)化信號(hào)鏈。大多數(shù)情況下,低通濾波器會(huì)提供某種抗混疊支持,而數(shù)字處理會(huì)提供更明確的頻率響應(yīng)邊界。一般而言,這些數(shù)字濾波器會(huì)努力保護(hù)代表實(shí)際振動(dòng)的信號(hào)內(nèi)容,同時(shí)將帶外噪聲的影響降至最低。因此,當(dāng)估計(jì)噪聲帶寬時(shí),數(shù)字處理是系統(tǒng)中要考慮的影響最大的部分。此類處理可采用時(shí)域技術(shù),例如帶通濾波器,或采用頻譜技術(shù),例如快速傅里葉變換(FFT)。
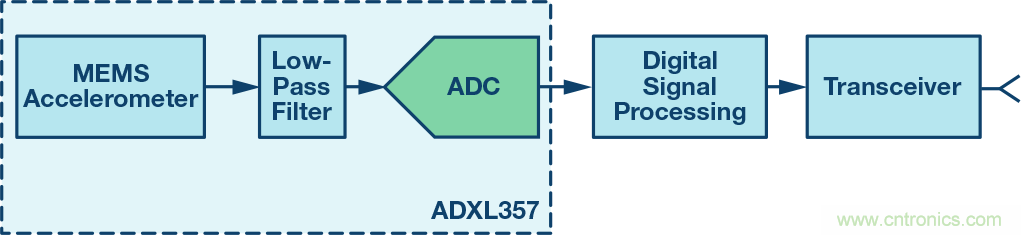
圖4.振動(dòng)檢測(cè)節(jié)點(diǎn)信號(hào)鏈
等式9提供了一個(gè)用于估計(jì)MEMS加速度計(jì)測(cè)量總噪聲(ANOISE)的關(guān)系式,其中使用了噪聲密度(φND)和與信號(hào)鏈相關(guān)的噪聲帶寬(fNBW)。
利用等式9中的關(guān)系,我們可以估計(jì):當(dāng)對(duì)ADXL357(噪聲密度為80 μg/√Hz)使用噪聲帶寬為100 Hz的濾波器時(shí),總噪聲將為0.8 mg (rms)。
用速度衡量振動(dòng)
某些CBM應(yīng)用需要用線速度來(lái)衡量核心加速度特性(范圍、帶寬、噪聲)。進(jìn)行這種轉(zhuǎn)換的一種方法是從圖1所示簡(jiǎn)單模型開始,并使用同樣的假設(shè):線性運(yùn)動(dòng)、單一頻率和零平均位移。等式10通過(guò)圖1中物體瞬時(shí)速度(vV)的數(shù)學(xué)關(guān)系式表述了該模型。此速度的幅度(表示為均方根rms)等于峰值速度除以√2。

等式11對(duì)此關(guān)系求導(dǎo),得出圖1中物體瞬時(shí)加速度的關(guān)系式:
從等式11中加速度模型的峰值出發(fā),等式12導(dǎo)出了加速度幅度(Arms)與速度幅度(Vrms)和振動(dòng)頻率(fv)的新關(guān)系式。
案例研究
現(xiàn)在以ADXL357為例進(jìn)行研究,將上述內(nèi)容匯總起來(lái),用線速度表示其范圍(峰值)和1 Hz至1000 Hz振動(dòng)頻率范圍內(nèi)的分辨率。圖5提供了對(duì)本案例有影響的多個(gè)特性的圖形定義,從ADXL357噪聲密度相對(duì)于1 Hz至1000 Hz頻率范圍的關(guān)系曲線開始。為了簡(jiǎn)化討論,本案例研究中的所有計(jì)算均假設(shè)全部頻率范圍內(nèi)的噪聲密度為恒定值(φND = 80 μg/√Hz)。圖5中的紅色頻譜曲線表示帶通濾波器的頻譜響應(yīng),綠色豎直線表示單一頻率(fV)振動(dòng)的頻譜響應(yīng),其對(duì)基于速度估計(jì)分辨率和范圍會(huì)很有用。
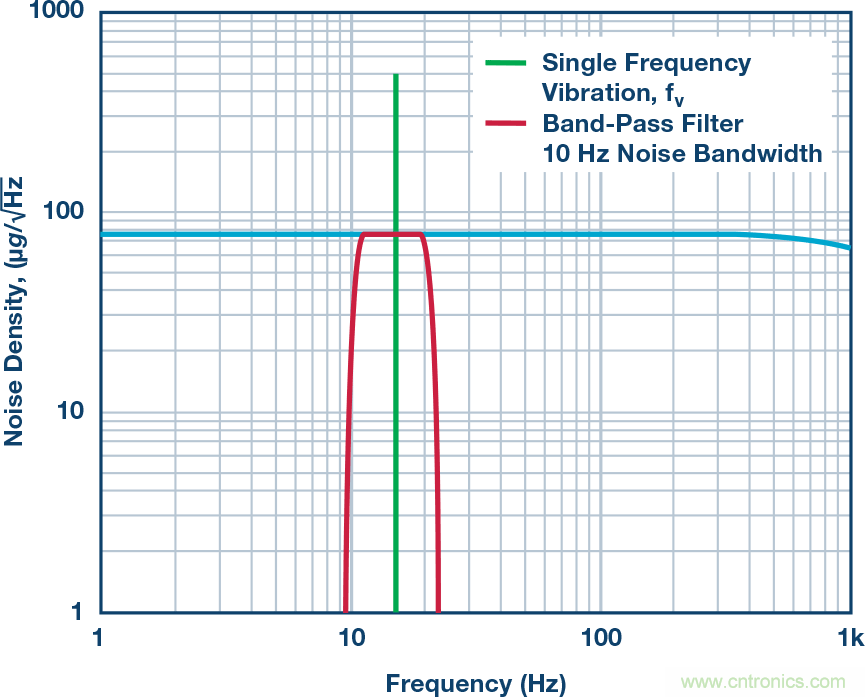
圖5.研究案例的噪聲密度和濾波
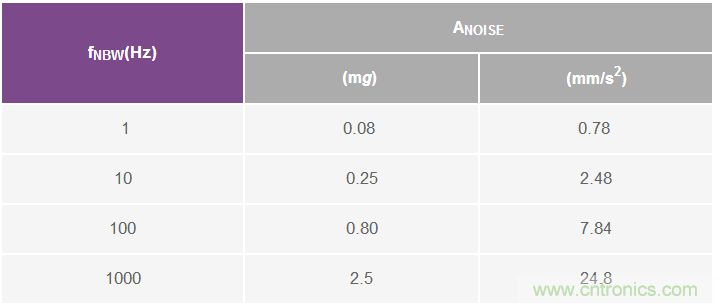
此過(guò)程的第一步是利用等式9估計(jì)四個(gè)不同噪聲帶寬(fNBW)產(chǎn)生的噪聲(ANOISE):1 Hz、10 Hz、100 Hz和1000 Hz。表2用兩個(gè)不同單位的線速度給出了這些結(jié)果:g和mm/s2。g在多數(shù)MEMS加速度計(jì)規(guī)格表中相當(dāng)常見,但振動(dòng)指標(biāo)常常不是以此來(lái)提供。幸運(yùn)的是,g和mm/s2的關(guān)系已為大家熟知,參見等式13。
表2.傳感器對(duì)振動(dòng)/噪聲的響應(yīng)
本案例研究的下一步是整理等式12中的關(guān)系,以導(dǎo)出一個(gè)簡(jiǎn)單的公式(參見等式14)來(lái)將總噪聲估計(jì)(來(lái)自表2)轉(zhuǎn)換為線速度項(xiàng)(VRES、VPEAK)。除了提供此關(guān)系的一般形式之外,等式14還提供了一個(gè)特定例子,其使用10 Hz的噪聲帶寬(及2.48 mm/s2的加速度噪聲,來(lái)自表2)。圖6中的四條虛線表示所有四種噪聲帶寬下相對(duì)于振動(dòng)頻率(fv)的速度分辨率。
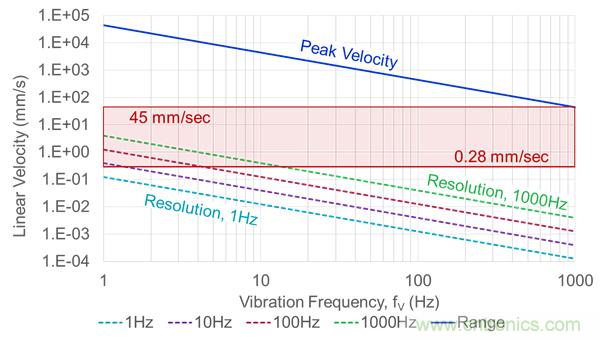
圖6.峰值和分辨率與振動(dòng)頻率的關(guān)系
除了顯示各帶寬對(duì)應(yīng)的分辨率之外,圖6還有一條藍(lán)色實(shí)線,其表示相對(duì)于頻率的峰值振動(dòng)水平(線速度)。這來(lái)自等式15中的關(guān)系,其一般形式與等式14相同,但不使用分子中的噪聲,而使用ADXL357支持的最大加速度。注意,分子中的系數(shù)√2會(huì)放大此最大加速度以反映均方根水平,假設(shè)采用單一頻率振動(dòng)模型。
最后,紅框說(shuō)明如何將此信息應(yīng)用于系統(tǒng)級(jí)要求。此紅框中的最小(0.28 mm/s)和最大(45 mm/s)速度來(lái)自關(guān)于機(jī)器振動(dòng)的常用工業(yè)標(biāo)準(zhǔn)中的一些分類水平:ISO-10816-1。將關(guān)于ADXL357范圍和分辨率曲線的要求放在一起便可快速得出一些簡(jiǎn)單的結(jié)論,例如:
1.測(cè)量范圍的最差情況是在最高頻率時(shí),ADXL357的±40 g范圍似乎能夠測(cè)量很大一部分的ISO-10816-1相關(guān)振動(dòng)模式。
2.當(dāng)用噪聲帶寬為10 Hz的濾波器處理ADXL357的輸出信號(hào)時(shí),ADXL357似乎能夠在1.5 Hz至1000 Hz頻率范圍內(nèi)解析ISO-10816-1中的最低振動(dòng)水平(0.28 mm/s)。
3.當(dāng)用噪聲帶寬為1 Hz的濾波器處理ADXL357的輸出信號(hào)時(shí),ADXL357似乎能夠在1 Hz至1000 Hz的全部頻率范圍內(nèi)解析ISO-10816-1中的最低振動(dòng)水平。
結(jié)語(yǔ)
MEMS已是成熟的振動(dòng)傳感器,在現(xiàn)代工廠CBM系統(tǒng)的技術(shù)融合完美風(fēng)暴中發(fā)揮著重要作用。檢測(cè)、連接、存儲(chǔ)、分析和安全領(lǐng)域的新解決方案全都互相融合,為工廠管理者提供完全集成的振動(dòng)觀測(cè)和過(guò)程反饋控制系統(tǒng)。雖然很容易迷失在所有此類驚人技術(shù)進(jìn)步所帶來(lái)的興奮之中,但人們?nèi)孕枰私馊绾螌鞲衅鳒y(cè)量結(jié)果與實(shí)際條件和其代表的含義聯(lián)系起來(lái)。這些簡(jiǎn)單的技術(shù)和見解提供了一種將MEMS性能規(guī)格轉(zhuǎn)換為使用熟悉的單位表示的其對(duì)關(guān)鍵系統(tǒng)級(jí)標(biāo)準(zhǔn)影響的方法,CBM開發(fā)商及其客戶將能從中獲取價(jià)值。
參考電路
1. Gerald C. Gill and Paul L. Hexter. “IEEE地球科學(xué)電子論文集.” IEEE,第11卷第2期,1973年4月。
推薦閱讀:



